Exercice Résolu sur les Mouvement Bidimensionnel
publicité
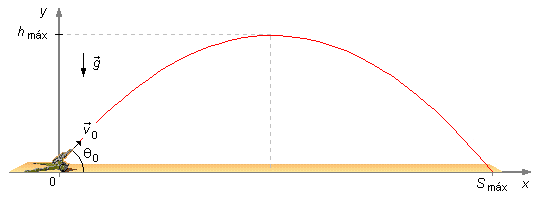
Un projectile est tiré avec une vitesse initiale v0 et formant un angle θ0 avec l'horizontale, en sachant que les points de tir et la cible sont sur le même plan horizontal et en négligeant la résistance de l'air, déterminer:
a) La hauteur maximale atteinte par le projectile;
b) Le temps nécessaire pour atteindre la hauteur maximale;
c) Le temps total de durée du mouvement;
d) La portée maximale horizontale du projectile;
e) L'équation de la trajectoire du mouvement du projectile;
f) L'angle de tir qui permet d'obtenir la portée maximale;
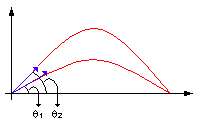
g) Démontrer que des tirs avec des angles complémentaires ont la même portée;
h) La vitesse en un point quelconque de la trajectoire;
i) Les composantes de l'accélération en un point quelconque de la trajectoire.
Données du problème:
- Vitesse initiale: v0;
- Angle de tir par rapport à l'horizontale: θ0.
Nous choisissons un referentiel avec l'axe Ox pointant vers la droite et Oy vers le haut, l'accélération de la pesanteur pointant vers le bas et le point de tir étant à l'origine du référentiel (x0, y0) = (0, 0), (Figure 1).
Solution
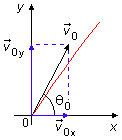
Le mouvement peut être décomposé le long des axes x et y. Les composantes de la vitesse initiale v0 sont données en module par (Figure 2)
\[
\begin{gather}
v_{0x}=v_0\cos\theta_0 \tag{I}\\[5pt]
v_{0y}=v_0\operatorname{sen}\theta_0 \tag{II}
\end{gather}
\]
Dans la direction x, il n'y a pas d'accélération agissant sur le projectile, il est en
Mouvement Rectiligne Uniforme, son mouvement est donné par l'équation (Figure 2)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+vt}
\end{gather}
\]
\[
\begin{gather}
S_x=S_{0x}+v_x t
\end{gather}
\]
dans le mouvement uniforme, vx = v0x est constant, nous pouvons substituer vx par la valeur de (I) et S0x = 0
\[
\begin{gather}
S_x=0+(v_0\cos\theta_0)t\\[5pt]
S_x=v_0\cos\theta_0 t \tag{III}
\end{gather}
\]
Dans la direction y, le projectile est soumis à l'accélération de la pesanteur, c'est un
Mouvement Rectiligne Uniformément Varié, représenté par un lancement vers haut pendant la montée et
une chute libre lors de la descente, où S0y = 0, v0y est
donnée par l'expression (II) et a = −g est l'accélération de la pesanteur qui est
opposée à l'orientation de la trajectoire.
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+v_0 t+\frac{a}{2}t^2}
\end{gather}
\]
\[
\begin{gather}
S_y=S_{0y}+v_{0y}t-\frac{g}{2}t^2\\[5pt]
S_y=0+(v_0\operatorname{sen}\theta_0)t-\frac{g}{2}t^2\\[5pt]
S_y=v_0\operatorname{sen}\theta_0t-\frac{g}{2}t^2 \tag{IV}
\end{gather}
\]
l'équation de la vitesse est donnée par
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=v_0+at}
\end{gather}
\]
\[
\begin{gather}
v_y=v_{0y}-gt\\[5pt]
v_y=v_0\operatorname{sen}\theta_0-gt \tag{V}
\end{gather}
\]
l'équation de la vitesse en fonction de l'accélération et du déplacement est donnée par
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v^2=v_0^2+2a\Delta S}
\end{gather}
\]
\[
\begin{gather}
v_y^2=v_{0y}^2-2g\Delta S_y\\[5pt]
v_y^2=(v_0\operatorname{sen}\theta_0)^2-2g\Delta S_y\\[5pt]
v_y^2=v_0^2\operatorname{sen}^2\theta_0-2g\Delta S_y \tag{VI}
\end{gather}
\]
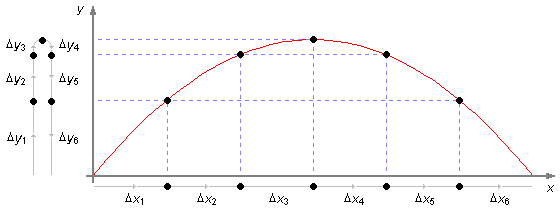
Dans la Figure 3, nous voyons que dans le mouvement le long de la direction x, pour des intervalles de
temps égaux, nous avons des déplacements égaux
(Δx1 = Δx2 = Δx3 =
Δx4 = Δx5 = Δx6). Dans la
direction y, pendant la montée, pour des intervalles de temps égaux, nous avons des déplacements plus
petits, la particule est freinée par l'action de la gravité
(Δy1 > Δy2 > Δy3), jusqu'à ce
que la vitesse vy soit nulle. Pendant la descente, la gravité commence à ramener la
particule au sol avec une vitesse accélérée, pour des intervalles de temps égaux, nous avons des dẽplacements
de plus en plus grands
(Δy4 < Δy5 < Δy6).
a) Pour trouver la hauteur maximale, hmax, atteinte par le projectile, nous analysons le mouvement le long de la direction y. Lorsque le projectile atteint la hauteur maximale, sa vitesse vy devient nulle, vy = 0, en utilisant l'équation (VI)
\[
\begin{gather}
0^2=v_0^2\operatorname{sen}\theta_0^2-2gh_{max}\\[5pt]
2gh_{max}=v_0^2\operatorname{sen}^2\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{h_{max}=\frac{v_0^2\operatorname{sen}^2\theta_0}{2g}}
\end{gather}
\]
b) Le temps de montée, tM, pour atteindre la hauteur maximale sera obtenu à partir de l'équation (V) avec la condition que la vitesse soit nulle à la hauteur maximale atteinte par le projectile, vy = 0
\[
\begin{gather}
0=v_0\operatorname{sen}\theta_0-gt_M\\[5pt]
gt_M=v_0\operatorname{sen}\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_M=\frac{v_0\operatorname{sen}\theta_0}{g}}
\end{gather}
\]
c) Le temps total, tT, du mouvement sera la somme des temps de montée, tM, et de descente, tD, sachant que dans le mouvement de lancement vertical et de chute libre, les temps de montée et de descente sont égaux. Nous avons donc la condition
\[
\begin{gather}
t_T=t_M+t_D
\end{gather}
\]
avec tM = tD
\[
\begin{gather}
t_T=2t_M
\end{gather}
\]
en utilisant le résultat pour le temps de montée obtenu dans l'élément précédent
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_T=2\frac{v_0\operatorname{sen}\theta_0}{g}}
\end{gather}
\]
d) Le temps calculé ci-dessus, pour que le projectile monte et descende, est également le temps qu'il mettra pour aller de l'origine jusqu'au point Smax le long de l'axe des x, en remplaçant la réponse de l'élément précédent dans l'équation (III)
\[
\begin{gather}
S_{max}=\left(v_0\cos\theta_0\right)\left(2\frac{v_0\operatorname{sen}\theta_0}{g}\right)\\[5pt]
S_{max}=\frac{v_0^2}{g}2\operatorname{sen}\theta_0\cos\theta_0
\end{gather}
\]
De la Trigonométrie
\[
\begin{gather}
\operatorname{sen}(\alpha+\alpha)=\operatorname{sen}\alpha\cos\alpha+\operatorname{sen}\alpha\cos\alpha\\[5pt]
\operatorname{sen}(2\alpha)=2\operatorname{sen}\alpha\cos\alpha
\end{gather}
\]
et en substituant cette identité dans l'équation ci-dessus, nous obtenons la portée maximale
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_0)}
\end{gather}
\]
e) Pour obtenir l'équation de la trajectoire, indiquée dans la Figure 1, nous devons avoir y comme fonction de x, ou y = f(x), en utilisant les équations (III) et (IV) pour les mouvements en x et y et en se rappelant que S0x = S0y = 0, nous avons le système suivant
\[
\left\{
\begin{array}{l}
S_x=v_0\cos\theta_0t\\
S_y=v_0\operatorname{sen}\theta_0t-\dfrac{g}{2}t^2
\end{array}
\right.
\]
en isolant le temps dans la première équation
\[
\begin{gather}
t=\frac{S_x}{v_0\cos\theta_0}
\end{gather}
\]
en substituant cette valeur dans la deuxième équation
\[
\begin{gather}
S_y=v_0\operatorname{sen}\theta_0\left(\frac{S_x}{v_0\cos\theta_0}\right)-\frac{g}{2}\left(\frac{S_x}{v_0\cos\theta_0}\right)^2
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_y=-{\frac{g}{2v_0^2\cos^2\theta_0}S_x^2}+\frac{\operatorname{sen}\theta_0}{\cos\theta_0}S_x}
\end{gather}
\]
En faisant l'association montrée ci-dessous avec une Équation du Second Degré du type
y = ax2+bx+c
\[
\begin{array}{c}
S_y & = & -{\dfrac{g}{2v_0^2\cos^2\theta_0}} & S_x^2 & + & \dfrac{\operatorname{sen}\theta_0}{\cos\theta_0} & S_x & + & 0 \\
{\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} \\
y & = & a & x^2 & + & b & x & + & c \\
\end{array}
\]
nous voyons que nous avons obtenu une fonction du type Sy = f(Sx)
avec le coefficient a < 0, ce qui indique que notre trajectoire est une parabole tournée vers le
bas.
f) La réponse obtenue dans l'article (d) pour la portée maximale, Smax, dépend de l'angle initial de lancement. De la trigonométrie, nous savons que la fonction sinus varie de −1 à 1. La valeur maximale de la portée se produit lorsque
\[
\begin{gather}
\operatorname{sen}(2\theta_0)=1\\[5pt]
2\theta_0=\operatorname{arc sen}(1)
\end{gather}
\]
En Trigonométrie, le sinus dont l'arc vaut 1 est
\[
\begin{gather}
\theta_0=\operatorname{arc sen}(1)=90°
\end{gather}
\]
\[
\begin{gather}
2\theta_0=90°\\[5pt]
\theta_0=\frac{90°}{2}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta_0=45°}
\end{gather}
\]
g) En trigonométrie, nous savons que les angles complémentaires sont ceux dont la somme est égale à 90° ou \( \frac{\pi}{2} \), deux angles θ1 et θ2 sont complémentaires
\[
\begin{gather}
\theta_1+\theta_2=\frac{\pi}{2} \tag{VII}
\end{gather}
\]
En utilisant le résultat de l'élément (d) qui donne la portée maximale, nous écrivons les portées
Smax1 et Smax2 pour les angles ci-dessus
\[
\begin{gather}
S_{max1}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_1) \tag{VIII}\\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_2) \tag{IX}
\end{gather}
\]
En écrivant l'expression (VII) de θ2 en fonction de θ1
\[
\begin{gather}
\theta_2=\frac{\pi}{2}-\theta_1
\end{gather}
\]
et en substituant dans l'équation (IX)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}\left[2\left(\frac{\pi}{2}-\theta_1\right)\right]\\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}\left(\pi-2\theta_1\right)
\end{gather}
\]
De la Trigonométrie
\[
\operatorname{sen}(\alpha-\beta)=\operatorname{sen}\alpha\cos\beta-\operatorname{sen}\beta\cos\alpha
\]
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left(\operatorname{sen}\pi\cos 2\theta_1-\operatorname{sen}2\theta_1\cos\pi\right)
\end{gather}
\]
étant donné
\( \operatorname{sen}\pi=0 \),
\( \cos\pi=-1 \)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left[0.\cos2\theta_1-\operatorname{sen}2\theta_1.(-1)\right]\\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_1) \tag{X}
\end{gather}
\]
en comparant les équations (VIII) et (X)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max1}=S_{max2}} \tag{Q.E.D}
\end{gather}
\]
Remarque: Q.E.D. est l'abréviation de l'expression latine "quod erat demonstrandum",
ce qui signifie "ce qu'il fallait démontrer".
h) En un point quelconque de la trajectoire, le vecteur vitesse,
\( \vec v \),
peut être décomposé en ses composantes le long des axes x et y,
\( {\vec v}_x \)
et
\( {\vec v}_y \),
(Figure 5-A).
Le vecteur vitesse sera la somme vectorielle de ses composantes
Le vecteur vitesse sera la somme vectorielle de ses composantes
\[
\begin{gather}
\vec v={\vec v}_x+{\vec v}_y
\end{gather}
\]
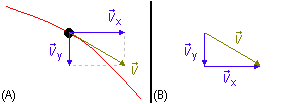
Dans la Figure 5-B, nous voyons que les vecteurs forment un triangle rectangle et le module de la vitesse peut être calculé en appliquant le Théorème de Pythagore
\[
\begin{gather}
v^2=v_x^2+v_y^2 \tag{XI}
\end{gather}
\]
en utilisant vx = v0x de l'expression (I), et
vy de l'équation (V)
\[
\begin{gather}
v^2=(v_0\cos\theta_0)^2+(v_0\operatorname{sen}\theta_0-gt)^2\\[5pt]
v^2=v_0^2\cos^2\theta_0+v_0^2\operatorname{sen}^2\theta_0-2v_0\operatorname{sen}\theta_0gt+g^2t^{2}
\end{gather}
\]
dans les deux premiers termes du côté droit de l'égalité, nous factorisant
\( v_0^2 \)
et dans les troisième et quatrième termes, factorisant −2g
\[
\begin{gather}
v^2=v_0^2\left(\cos^2\theta_0+\operatorname{sen}^2\theta_0\right)-2g\left(v_0\operatorname{sen}\theta_0t-g\frac{t^2}{2}\right) \tag{XII}
\end{gather}
\]
De la Trigonométrie
\[
\begin{gather}
\cos^2\alpha+\operatorname{sen}^2\alpha=1
\end{gather}
\]
dans le premier terme entre parenthèses, nous appliquons la relation trigonométrique ci-dessus, le deuxième terme entre parenthèses peut être obtenu à partir de l'équation (IV) de la position dans la direction y avec S0 = S0y
\[
\begin{gather}
S_y-S_{0y}=v_0\operatorname{sen}\theta_0t-\frac{g}{2}t^2
\end{gather}
\]
étant donné
\( \Delta S_y=S_y-S_{0y} \),,
ainsi l'équation (XII) peut être écrite
\[
\begin{gather}
v^2=v_0^2-2g\Delta S_y
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
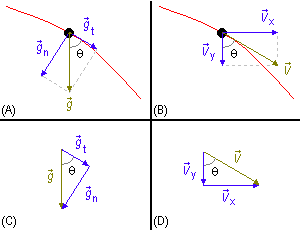
i) L'accélération de la pesanteur, \( \vec g \), à laquelle le projectile est soumis à n'importe quel point de la trajectoire peut être décomposée en accélération tangentielle, \( {\vec g}_t \), et en accélération normale, \( {\vec g}_n \), qui est perpendiculaire à la trajectoire au point considéré (Figure 6-A). De la Figure 6-C
\[
\begin{gather}
\cos\theta =\frac{g_t}{g}\\[5pt]
g_t=g\cos\theta \tag{XIII}
\end{gather}
\]
\[
\begin{gather}
\operatorname{sen}\theta =\frac{g_n}{g}\\[5pt]
g_n=g\operatorname{sen}\theta \tag{XIV}
\end{gather}
\]
où θ est l'angle entre l'accélération de la pesanteur,
\( \vec g \),
et sa composante tangentielle,
\( {\vec g}_t \),
à n'importe quel point de la trajectoire. Mais cet angle est le même que celui entre la vitesse du
projectile,
\( \vec v \),
et sa composante le long de la direction y,
\( {\vec v}_y \),
(Figure 6-B).
Par la Figure 6-D
Par la Figure 6-D
\[
\begin{gather}
\cos\theta =\frac{v_y}{v}
\end{gather}
\]
en utilisant le résultat de l'article précédent pour la valeur de la vitesse
\[
\begin{gather}
\cos\theta =\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
en substituant cette valeur du cosinus dans l'expression (XIII), l'accélération tangentielle sera
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_t=g\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
De même que dans la Figure 6-D
\[
\begin{gather}
\operatorname{sen}\theta =\frac{v_x}{v}\\[5pt]
\operatorname{sen}\theta=\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
et en substituant dans l'expression (XIV) pour l'accélération normale
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_n=g\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
publicité

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .