Solved Problem on Two-dimensional Motion
advertisement
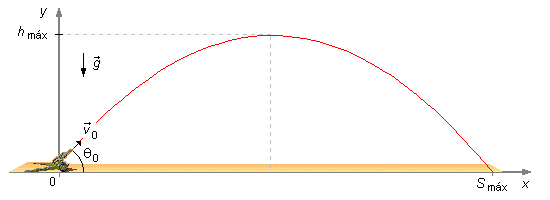
A projectile is fired with an initial velocity equal to v0 and at an angle θ0 with the horizontal, the firing point and the target are on the same horizontal plane, and neglecting air resistance, determine:
a) The maximum height that the projectile reaches;
b) The time required to reach the maximum height;
c) The duration of the total movement;
d) The maximum horizontal range of the projectile;
e) The equation of the trajectory;
f) The angle of fire that provides the maximum range;
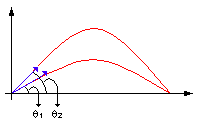
g) Show that shots with complementary angles have the same range;
h) The speed at any point on the trajectory;
i) The components of acceleration at any point on the trajectory.
Problem data:
- Initial speed: v0;
- Shooting angle with the horizontal: θ0.
We choose a reference frame with the axis Ox pointing to the right and Oy pointing in the upward direction, the acceleration due to gravity pointing downward, and the trigger point at the origin of the frame of reference (x0, y0) = (0, 0), (Figure 1).
Solution
The motion can be decomposed along the x and y axes, the components of the initial velocity v0, in magnitude (Figure 2)
\[
\begin{gather}
v_{0x}=v_0\cos\theta_0 \tag{I}\\[5pt]
v_{0y}=v_0\sin\theta_0 \tag{II}
\end{gather}
\]
In the x direction, there is no acceleration acting on the projectile, it is in uniform motion,
and its motion is given by the equation
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+vt}
\end{gather}
\]
\[
\begin{gather}
S_x=S_{0x}+v_x t
\end{gather}
\]
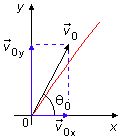
Figure 2
in uniform motion, vx = v0x is constant, we can substitute vx by the value of (I) and S0x = 0
\[
\begin{gather}
S_x=0+(v_0\cos\theta_0)t\\[5pt]
S_x=v_0\cos\theta_0 t \tag{III}
\end{gather}
\]
In the y direction of the projectile, the acceleration due to gravity acts on it, the motion
represented by a vertical launch during the ascent and a free fall on the descent, where
S0y = 0, v0y is given by expression (II), and
a = −g the acceleration due to gravity is the opposite direction of the reference frame.
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+v_0 t+\frac{a}{2}t^2}
\end{gather}
\]
\[
\begin{gather}
S_y=S_{0y}+v_{0y}t-\frac{g}{2}t^2\\[5pt]
S_y=0+(v_0\sin\theta_0)t-\frac{g}{2}t^2\\[5pt]
S_y=v_0\sin\theta_0t-\frac{g}{2}t^2 \tag{IV}
\end{gather}
\]
the velocity equation as a function of time is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=v_0+at}
\end{gather}
\]
\[
\begin{gather}
v_y=v_{0y}-gt\\[5pt]
v_y=v_0\sin\theta_0-gt \tag{V}
\end{gather}
\]
the equation of velocity as a function of displacement is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v^2=v_0^2+2a\Delta S}
\end{gather}
\]
\[
\begin{gather}
v_y^2=v_{0y}^2-2g\Delta S_y\\[5pt]
v_y^2=(v_0\sin\theta_0)^2-2g\Delta S_y\\[5pt]
v_y^2=v_0^2\sin^2\theta_0-2g\Delta S_y \tag{VI}
\end{gather}
\]
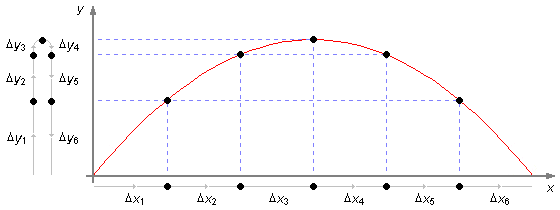
In Figure 3, we see that in the motion along the x direction, we have that for equal time intervals
we have equal displacement intervals
(Δx1 = Δx2 = Δx3 =
Δx4 = Δx5 = Δx6). In the y
direction, we have that during the rising, for equal time intervals we have smaller displacement intervals,
the projectile is being braked by the action of gravity
(Δy1 > Δy2 > Δy3) until the
velocity vy equals zero. During the fall, gravity begins to pull the projectile back to
the ground with an accelerated velocity, for equal time intervals we have increasingly larger displacement
intervals (Δy4 < Δy5 < Δy6).
a) To find the maximum height, hmax, reached by the projectile, we analyze the motion along the y direction. When the projectile reaches maximum height its velocity vy equals zero, vy = 0, using the equation (VI)
\[
\begin{gather}
0^2=v_0^2\sin\theta_0^2-2gh_{max}\\[5pt]
2gh_{max}=v_0^2\sin^2\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{h_{max}=\frac{v_0^2\sin^2\theta_0}{2g}}
\end{gather}
\]
b) The time of rising, tR, to reach the maximum height will be obtained from equation (V) with the condition that the velocity equals zero at the maximum height reached by the projectile, vy = 0
\[
\begin{gather}
0=v_0\sin\theta_0-gt_{\small R}\\[5pt]
gt_{\small R}=v_0\sin\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_{\small R}=\frac{v_0\sin\theta_0}{g}}
\end{gather}
\]
c) The total time, tT, of the motion will be the sum of the rising time, tR, and the descent time, tD, in the vertical launch and free fall motion the rising and descent times are equal, we have the condition
\[
\begin{gather}
t_{\small T}=t_{\small R}+t_{\small D}
\end{gather}
\]
with tR = tD
\[
\begin{gather}
t_{\small T}=2t_{\small R}
\end{gather}
\]
using the result for the rise time obtained in the previous item
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_{\small T}=2\frac{v_0\sin\theta_0}{g}}
\end{gather}
\]
d) The time calculated above for the projectile to rise and fall is also the time it will take to go from the origin to the point Smax along the x-axis, substituting the answer to the previous item in equation (III)
\[
\begin{gather}
S_{max}=\left(v_0\cos\theta_0\right)\left(2\frac{v_0\sin\theta_0}{g}\right)\\[5pt]
S_{max}=\frac{v_0^2}{g}2\sin\theta_0\cos\theta_0
\end{gather}
\]
From the Trigonometry
\[
\begin{gather}
\sin(\alpha+\alpha)=\sin\alpha\cos\alpha+\sin\alpha\cos\alpha\\[5pt]
\sin(2\alpha)=2\operatorname{sen}\alpha\cos\alpha
\end{gather}
\]
and substituting this identity in the equation above, we get the maximum range
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max}=\frac{v_0^2}{g}\sin(2\theta_0)}
\end{gather}
\]
e) To obtain the equation of motion, indicated in Figure 1, we have y as a function of x, or y = f(x), using equations (III) and (IV) for the movements in x and y and remembering that S0x = S0y = 0, we have the system
\[
\left\{
\begin{array}{l}
S_x=v_0\cos\theta_0t\\
S_y=v_0\sin\theta_0t-\dfrac{g}{2}t^2
\end{array}
\right.
\]
solving the first equation for time
\[
\begin{gather}
t=\frac{S_x}{v_0\cos\theta_0}
\end{gather}
\]
substituting this value in the second equation
\[
\begin{gather}
S_y=v_0\sin\theta_0\left(\frac{S_x}{v_0\cos\theta_0}\right)-\frac{g}{2}\left(\frac{S_x}{v_0\cos\theta_0}\right)^2
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_y=-{\frac{g}{2v_0^2\cos^2\theta_0}S_x^2}+\frac{\sin\theta_0}{\cos\theta_0}S_x}
\end{gather}
\]
Making the association shown below with a Quadratic Equation of the type
y = ax2+bx+c
\[
\begin{array}{c}
S_y & = & -{\dfrac{g}{2v_0^2\cos^2\theta_0}} & S_x^2 & + & \dfrac{\sin\theta_0}{\cos\theta_0} & S_x & + & 0 \\
{\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} \\
y & = & a & x^2 & + & b & x & + & c \\
\end{array}
\]
we see that we obtained a function of the type Sy = f(Sx) with
the coefficient a < 0 which indicates that our trajectory is a parabola concave downwards.
f) The answer obtained in item (d) for the maximum range, Smax, depends on the initial launch angle, from trigonometry we know that the sine function varies from −1 to 1, and the maximum range value occurs when
\[
\begin{gather}
\sin(2\theta_0)=1\\[5pt]
2\theta_0=\operatorname{arc sen}(1)
\end{gather}
\]
From the Trigonometry, the sine whose arc is equal to 1 is
\[
\begin{gather}
\theta_0=\operatorname{arc sen}(1)=90°
\end{gather}
\]
\[
\begin{gather}
2\theta_0=90°\\[5pt]
\theta_0=\frac{90°}{2}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta_0=45°}
\end{gather}
\]
g) In trigonometry we have that complementary angles are those that add up to 90° or \( \frac{\pi }{2} \), two complementary angles θ1 and θ2
\[
\begin{gather}
\theta_1+\theta_2=\frac{\pi}{2} \tag{VII}
\end{gather}
\]
Using the result of item (d) which gives the maximum range, we write the ranges
Smax1 and Smax2 for the above angles
\[
\begin{gather}
S_{max1}=\frac{v_0^2}{g}\sin(2\theta_1) \tag{VIII}\\[5pt]
S_{max2}=\frac{v_0^2}{g}\sin(2\theta_2) \tag{IX}
\end{gather}
\]
Writing the expression (VII) of θ2 as a function of θ1
\[
\begin{gather}
\theta_2=\frac{\pi}{2}-\theta_1
\end{gather}
\]
and substituting in the equation (IX)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\sin\left[2\left(\frac{\pi}{2}-\theta_1\right)\right]\\[5pt]
S_{max2}=\frac{v_0^2}{g}\sin\left(\pi-2\theta_1\right)
\end{gather}
\]
From the Trigonometry
\[
\sin(\alpha-\beta)=\sin\alpha\cos\beta-\sin\beta\cos\alpha
\]
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left(\sin\pi\cos 2\theta_1-\sin2\theta_1\cos\pi\right)
\end{gather}
\]
we have
\( \sin \pi =0 \),
\( \cos \pi =-1 \)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left[0.\cos2\theta_1-\sin2\theta_1.(-1)\right]\\[5pt]
S_{max2}=\frac{v_0^2}{g}\sin(2\theta_1) \tag{X}
\end{gather}
\]
comparing equations (VIII) and (X)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max1}=S_{max2}} \tag{Q.E.D}
\end{gather}
\]
Note: Q.E.D. is the abbreviation of the Latin expression "quod erat demosntrandum"
which means "which was to be demonstrated".
h) At any point on the trajectory, the velocity vector,
\( \vec v \),
can be decomposed into its components along the x and y axes,
\( {\vec v}_x \)
and
\( {\vec v}_y \),
(Figure 5-A).
The velocity vector will be the vector sum of its components
The velocity vector will be the vector sum of its components
\[
\begin{gather}
\vec v={\vec v}_x+{\vec v}_y
\end{gather}
\]
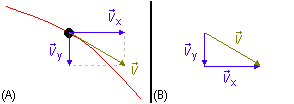
In Figure 5-B we see that the vectors form a right triangle and the speed is calculated applying the Pythagorean Theorem
\[
\begin{gather}
v^2=v_x^2+v_y^2 \tag{XI}
\end{gather}
\]
using vx = v0x from expression (I), and vy
from expression (V)
\[
\begin{gather}
v^2=(v_0\cos\theta_0)^2+(v_0\sin\theta_0-gt)^2\\[5pt]
v^2=v_0^2\cos^2\theta_0+v_0^2\sin^2\theta_0-2v_0\sin\theta_0gt+g^2t^{2}
\end{gather}
\]
factoring
\( v_{0}^{2} \)
in the first two terms on the right-hand side of the equation and −2g in the third and fourth
terms
\[
\begin{gather}
v^2=v_0^2\left(\cos^2\theta_0+\sin^2\theta_0\right)-2g\left(v_0\sin\theta_0t-g\frac{t^2}{2}\right) \tag{XII}
\end{gather}
\]
From the Trigonometry
\[
\begin{gather}
\cos^2\alpha+\sin^2\alpha=1
\end{gather}
\]
in the first term in parentheses we apply the trigonometric identity above, the second term in parentheses can be obtained from equation (IV) of the position in the y direction with S0 = S0y
\[
\begin{gather}
S_y-S_{0y}=v_0\sin\theta_0t-\frac{g}{2}t^2
\end{gather}
\]
if
\( \Delta S_y=S_{y}-S_{0y} \),
so the equation (XII) can be written
\[
\begin{gather}
v^2=v_0^2-2g\Delta S_y
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
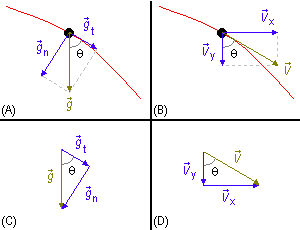
i) The acceleration due to gravity, \( \vec g \), to which the projectile is subjected at any point on the trajectory can be decomposed into the tangential acceleration, \( {\vec g}_t \), and the normal acceleration, \( {\vec g}_n \), which is perpendicular to the trajectory at the considered point (Figure 6-A). From Figure 6-C
\[
\begin{gather}
\cos\theta =\frac{g_t}{g}\\[5pt]
g_t=g\cos\theta \tag{XIII}
\end{gather}
\]
\[
\begin{gather}
\sin\theta =\frac{g_n}{g}\\[5pt]
g_n=g\sin\theta \tag{XIV}
\end{gather}
\]
where θ is the angle between the acceleration due to gravity,
\( \vec g \),
and its tangential component,
\( {\vec g}_t \),
at any point in the trajectory. But this angle is the same angle we have between the projectile's
velocity,
\( \vec v \),
and its component along the y direction,
\( {\vec v}_y \),
(Figure 6-B).
In the Figure 6-D
In the Figure 6-D
\[
\begin{gather}
\cos\theta =\frac{v_y}{v}
\end{gather}
\]
using the result of the previous item for the speed value
\[
\begin{gather}
\cos\theta =\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
substituting this cosine value in expression (XIII) the tangential acceleration will be
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_t=g\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
In the same way as Figure 6-D
\[
\begin{gather}
\sin\theta =\frac{v_x}{v}\\[5pt]
\sin\theta=\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
and substituting in expression (XIV) for the normal acceleration
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_n=g\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
advertisement

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .