Um projétil é disparado com velocidade inicial igual a v0 e formando um ângulo
θ0 com a horizontal, sabendo-se que os pontos de disparo e o alvo estão sobre o
mesmo plano horizontal e desprezando-se a resistência do ar, determine:
a) A altura máxima que o projétil atinge;
b) O tempo necessário para atingir a altura máxima;
c) O tempo de duração do movimento total;
d) O alcance máximo horizontal do projétil;
e) A equação da trajetória do movimento oblíquo;
f) O ângulo de tiro que proporciona o máximo alcance;
g) Mostre que tiros com ângulos complementares têm o mesmo alcance;
h) A velocidade num ponto qualquer da trajetória;
i) As componentes da aceleração num ponto qualquer da trajetória.
Dados do problema:
- Velocidade inicial: v0;
- Ângulo de tiro com a horizontal: θ0.
Esquema do problema:
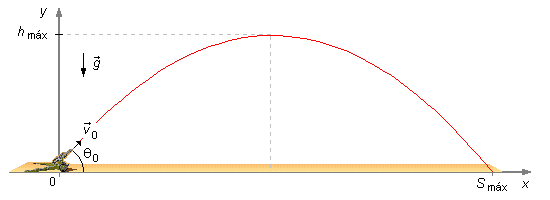
Adotamos um sistema de referência com o eixo Ox apontando para a direita e Oy para cima, a
aceleração da gravidade está apontada para baixo e o ponto de disparo está na origem do referencial
(x0, y0) = (0, 0), (Figura 1).
Solução:
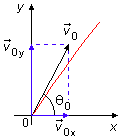
O movimento pode ser decomposto ao longo dos eixos x e y. As componentes da velocidade
inicial v0 são dadas em módulo por (Figura 2)
\[
\begin{gather}
v_{0x}=v_0\cos\theta_0 \tag{I} \\[5pt]
v_{0y}=v_0\operatorname{sen}\theta_0 \tag{II}
\end{gather}
\]
Na direção
x não há aceleração atuando sobre o projétil, ele está em
Movimento Retilíneo Uniforme (
M.R.U.), seu movimento é dado pela equação
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+vt}
\end{gather}
\]
\[
\begin{gather}
S_x=S_{0x}+v_x t
\end{gather}
\]
no movimento uniforme, vx = v0x é constante podemos substituir
vx pelo valor de (I) e S0x = 0
\[
\begin{gather}
S_x=0+(v_0\cos\theta_0)t \\[5pt]
S_x=v_0\cos\theta_0 t \tag{III}
\end{gather}
\]
Na direção y o projétil está sob a ação da aceleração da gravidade, é um
Movimento Uniformemente Variado (M.U.V.), representado por um lançamento vertical durante a
subida e uma queda livre na descida, onde S0y = 0, v0y é
dada pela expressão (II) e a = −g é a aceleração da gravidade que está na direção
oposta à orientação da trajetória.
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+v_0 t+\frac{a}{2}t^2}
\end{gather}
\]
\[
\begin{gather}
S_y=S_{0y}+v_{0y}t-\frac{g}{2}t^2 \\[5pt]
S_y=0+(v_0\operatorname{sen}\theta_0)t-\frac{g}{2}t^2 \\[5pt]
S_y=v_0\operatorname{sen}\theta_0t-\frac{g}{2}t^2 \tag{IV}
\end{gather}
\]
a equação da velocidade é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=v_0+at}
\end{gather}
\]
\[
\begin{gather}
v_y=v_{0y}-gt \\[5pt]
v_y=v_0\operatorname{sen}\theta_0-gt \tag{V}
\end{gather}
\]
a Equação de Torricelli é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v^2=v_0^2+2a\Delta S}
\end{gather}
\]
\[
\begin{gather}
v_y^2=v_{0y}^2-2g\Delta S_y \\[5pt]
v_y^2=(v_0\operatorname{sen}\theta_0)^2-2g\Delta S_y \\[5pt]
v_y^2=v_0^2\operatorname{sen}^2\theta_0-2g\Delta S_y \tag{VI}
\end{gather}
\]
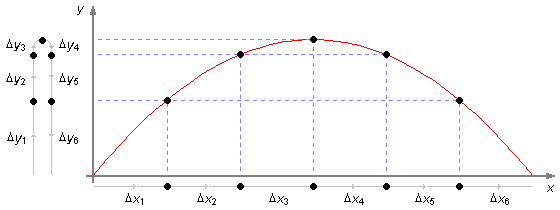
Na Figura 3 vemos que no movimento ao longo da direção x temos que para intervalos de tempos
iguais temos intervalos de espaços iguais
(Δx1 = Δx2 = Δx3 =
Δx4 = Δx5 = Δx6). Na direção
y temos que durante a subida para intervalos de tempos iguais temos intervalos de espaços menores,
a partícula está sendo freada pela ação da gravidade
(Δy1 > Δy2 > Δy3), até que a
velocidade vy se iguala a zero. Durante a descida a gravidade começa a puxar a partícula
de volta ao solo com velocidade acelerada, para intervalos de tempos iguais temos intervalos de espaços
cada vez maiores
(Δy4 < Δy5 < Δy6).
a) Para encontrarmos a altura máxima, hmax, atingida pelo projétil analisamos o movimento
ao longo da direção y. Quando o projétil atinge a altura máxima sua velocidade vy
se iguala a zero, vy = 0, usando a equação (VI)
\[
\begin{gather}
0^2=v_0^2\operatorname{sen}\theta_0^2-2gh_{max} \\[5pt]
2gh_{max}=v_0^2\operatorname{sen}^2\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{h_{max}=\frac{v_0^2\operatorname{sen}^2\theta_0}{2g}}
\end{gather}
\]
b) O tempo de subida, tS, para atingir a altura máxima será obtido da equação (V) com a
condição de que a velocidade se iguala a zero na altura máxima atingida pelo projétil,
vy = 0
\[
\begin{gather}
0=v_0\operatorname{sen}\theta_0-gt_{\small S} \\[5pt]
gt_{\small S}=v_0\operatorname{sen}\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_{\small S}=\frac{v_0\operatorname{sen}\theta_0}{g}}
\end{gather}
\]
c) O tempo total, tT, do movimento será a soma dos tempos de subida,
tS, e de descida, tD, sendo que no movimento de lançamento vertical
e queda livre os tempos de subida e de descida são iguais, temos a condição
\[
\begin{gather}
t_{\small T}=t_{\small S}+t_{\small D}
\end{gather}
\]
com tS = tD
\[
\begin{gather}
t_{\small T}=2t_{\small S}
\end{gather}
\]
usando o resultado para o tempo de subida obtido no item anterior
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_{\small T}=2\frac{v_0\operatorname{sen}\theta_0}{g}}
\end{gather}
\]
d) O tempo calculado acima, para o projétil subir e descer, é também o tempo que ele levará para ir da
origem até o ponto Smax ao longo do eixo-x, substituindo a resposta do item
anterior na equação (III)
\[
\begin{gather}
S_{max}=\left(v_0\cos\theta_0\right)\left(2\frac{v_0\operatorname{sen}\theta_0}{g}\right) \\[5pt]
S_{max}=\frac{v_0^2}{g}2\operatorname{sen}\theta_0\cos\theta_0
\end{gather}
\]
Da
Trigonometria
\[
\begin{gather}
\operatorname{sen}(\alpha+\alpha)=\operatorname{sen}\alpha\cos\alpha+\operatorname{sen}\alpha\cos\alpha \\[5pt]
\operatorname{sen}(2\alpha)=2\operatorname{sen}\alpha\cos\alpha
\end{gather}
\]
e substituindo esta identidade na equação acima, obtemos o alcance máximo
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_0)}
\end{gather}
\]
e) Para obter a equação da trajetória, indicada na Figura 1, temos que ter y com função de x,
ou y = f(x), usando as equações (III) e (IV) para os movimentos em x e y
e lembrando que S0x = S0y = 0, temos o sistema
\[
\left\{
\begin{array}{l}
S_x=v_0\cos\theta_0t \\
S_y=v_0\operatorname{sen}\theta_0t-\dfrac{g}{2}t^2
\end{array}
\right.
\]
isolando o tempo na primeira equação
\[
\begin{gather}
t=\frac{S_x}{v_0\cos\theta_0}
\end{gather}
\]
substituindo este valor na segunda equação
\[
\begin{gather}
S_y=v_0\operatorname{sen}\theta_0\left(\frac{S_x}{v_0\cos\theta_0}\right)-\frac{g}{2}\left(\frac{S_x}{v_0\cos\theta_0}\right)^2
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_y=-{\frac{g}{2v_0^2\cos^2\theta_0}S_x^2}+\frac{\operatorname{sen}\theta_0}{\cos\theta_0}S_x}
\end{gather}
\]
Fazendo a associação mostrada abaixo com uma Equação do 2.º Grau do tipo
y = ax2+bx+c
\[
\begin{array}{c}
S_y & = & -{\dfrac{g}{2v_0^2\cos^2\theta_0}} & S_x^2 & + & \dfrac{\operatorname{sen}\theta_0}{\cos\theta_0} & S_x & + & 0 \\
{\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} \\
y & = & a & x^2 & + & b & x & + & c \\
\end{array}
\]
vemos que obtivemos uma função do tipo Sy = f(Sx) com o
coeficiente a < 0 o que indica que a nossa trajetória é uma parábola de “boca” para baixo.
f) A resposta obtida no item (d) para o alcance máximo, Smax, depende do ângulo inicial
de lançamento, da trigonometria sabemos que a função seno varia de −1 a 1, o valor máximo do alcance
ocorre quando
\[
\begin{gather}
\operatorname{sen}(2\theta_0)=1 \\[5pt]
2\theta_0=\operatorname{arc sen}(1)
\end{gather}
\]
Da
Trigonometria, o seno cujo o arco vale 1 é
\[
\begin{gather}
\theta_0=\operatorname{arc sen}(1)=90°
\end{gather}
\]
\[
\begin{gather}
2\theta_0=90° \\[5pt]
\theta_0=\frac{90°}{2}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta_0=45°}
\end{gather}
\]
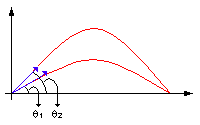
g) Em trigonometria temos que ângulos complementares são aqueles que somam 90° ou
\( \frac{\pi}{2} \),
dois ângulos θ1 e θ2 complementares
\[
\begin{gather}
\theta_1+\theta_2=\frac{\pi}{2} \tag{VII}
\end{gather}
\]
Usando o resultado do item (d) que dá o alcance máximo, escrevemos os alcances
Smax1 e
Smax2 para os ângulos acima
\[
\begin{gather}
S_{max1}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_1) \tag{VIII} \\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_2) \tag{IX}
\end{gather}
\]
Escrevendo a expressão (VII) de θ2 em função de θ1
\[
\begin{gather}
\theta_2=\frac{\pi}{2}-\theta_1
\end{gather}
\]
e substituindo na equação (IX)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}\left[2\left(\frac{\pi}{2}-\theta_1\right)\right] \\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}\left(\pi-2\theta_1\right)
\end{gather}
\]
Da
Trigonometria
\[
\operatorname{sen}(\alpha-\beta)=\operatorname{sen}\alpha\cos\beta-\operatorname{sen}\beta\cos\alpha
\]
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left(\operatorname{sen}\pi\cos 2\theta_1-\operatorname{sen}2\theta_1\cos\pi\right)
\end{gather}
\]
sendo
\( \operatorname{sen}\pi=0 \),
\( \cos\pi=-1 \)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left[0.\cos2\theta_1-\operatorname{sen}2\theta_1.(-1)\right] \\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_1) \tag{X}
\end{gather}
\]
comparando as equações (VIII) e (X)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max1}=S_{max2}} \tag{Q.E.D}
\end{gather}
\]
Observação: Q.E.D. é a abreviação da expressão em latim “quod erat demosntrandum” que
significa “como queríamos demonstrar”.
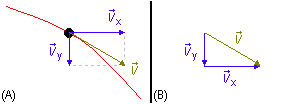
h) Em um ponto qualquer da trajetória o vetor velocidade,
\( \vec v \),
pode ser decomposto nas suas componentes ao longo dos eixos
x e
y,
\( {\vec v}_x \)
e
\( {\vec v}_y \),
(Figura 5-A).
O vetor velocidade será a soma vetorial de suas componentes
\[
\begin{gather}
\vec v={\vec v}_x+{\vec v}_y
\end{gather}
\]
Na Figura 5-B vemos que os vetores formam um triângulo retângulo e o módulo da velocidade pode ser
calculado aplicando o Teorema de Pitágoras
\[
\begin{gather}
v^2=v_x^2+v_y^2 \tag{XI}
\end{gather}
\]
usando vx = v0x da expressão (I), e vy da
equação (V)
\[
\begin{gather}
v^2=(v_0\cos\theta_0)^2+(v_0\operatorname{sen}\theta_0-gt)^2 \\[5pt]
v^2=v_0^2\cos^2\theta_0+v_0^2\operatorname{sen}^2\theta_0-2v_0\operatorname{sen}\theta_0gt+g^2t^{2}
\end{gather}
\]
nos dois primeiros termos do lado direito da igualdade colocamos
\( v_0^2 \)
em evidência e no terceiro e quarto termos colocamos −2g em evidência
\[
\begin{gather}
v^2=v_0^2\left(\cos^2\theta_0+\operatorname{sen}^2\theta_0\right)-2g\left(v_0\operatorname{sen}\theta_0t-g\frac{t^2}{2}\right) \tag{XII}
\end{gather}
\]
Da
Trigonometria
\[
\begin{gather}
\cos^2\alpha+\operatorname{sen}^2\alpha=1
\end{gather}
\]
no primeiro termo entre parênteses aplicamos a identidade trigonometrica acima, o segundo termo entre
parênteses pode ser obtido da equação (IV) da posição na direção y com
S0 = S0y
\[
\begin{gather}
S_y-S_{0y}=v_0\operatorname{sen}\theta_0t-\frac{g}{2}t^2
\end{gather}
\]
sendo
\( \Delta S_y=S_y-S_{0y} \),
assim a equação (XII) pode ser escrita
\[
\begin{gather}
v^2=v_0^2-2g\Delta S_y
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
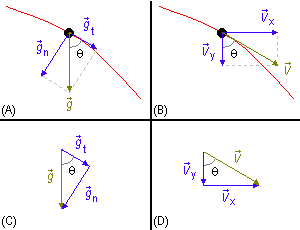
i) A aceleração da gravidade,
\( \vec g \),
a que o projétil está sujeito em qualquer ponto da trajetória pode ser decomposta na aceleração tangencial,
\( {\vec g}_t \),
e na aceleração normal,
\( {\vec g}_n \),
que é perpendicular à trajetória no ponto considerado (Figura 6-A). Da Figura 6-C
\[
\begin{gather}
\cos\theta =\frac{g_t}{g} \\[5pt]
g_t=g\cos\theta \tag{XIII}
\end{gather}
\]
\[
\begin{gather}
\operatorname{sen}\theta =\frac{g_n}{g} \\[5pt]
g_n=g\operatorname{sen}\theta \tag{XIV}
\end{gather}
\]
onde
θ é ângulo entre a aceleração da gravidade,
\( \vec g \),
e sua componente tangencial,
\( {\vec g}_t \),
num ponto qualquer da trajetória. Mas este ângulo é o mesmo que temos entre a velocidade do projétil,
\( \vec v \),
e sua componente ao longo da direção
y,
\( {\vec v}_y \),
(Figura 6-B).
Pela Figura 6-D
\[
\begin{gather}
\cos\theta =\frac{v_y}{v}
\end{gather}
\]
usando o resultado do item anterior para o valor da velocidade
\[
\begin{gather}
\cos\theta =\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
substituindo este valor do cosseno na expressão (XIII) a aceleração tangencial será
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_t=g\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
Da mesma forma da Figura 6-D
\[
\begin{gather}
\operatorname{sen}\theta =\frac{v_x}{v} \\[5pt]
\operatorname{sen}\theta=\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
e substituindo na expressão (XIV) para a aceleração normal
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_n=g\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]