Ejercicio Resuelto sobre Movimiento Bidimensional
publicidad
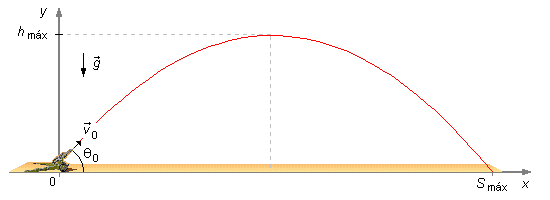
Un proyectil es disparado con velocidad inicial igual a v0 y formando un ángulo θ0 con la horizontal, sabiendo que los puntos de disparo y el objetivo están en el mismo plano horizontal y despreciando la resistencia del aire, determine:
a) La altura máxima que alcanza el proyectil;
b) El tiempo necesario para alcanzar la altura máxima;
c) El tiempo de duración del movimiento total;
d) El alcance máximo horizontal del proyectil;
e) La ecuación de la trayectoria del movimiento del proyectil;
f) El ángulo de tiro que proporciona el máximo alcance;
g) Demostrar que los disparos con ángulos complementarios tienen el mismo alcance;
h) La velocidad en cualquier punto de la trayectoria;
i) Las componentes de la aceleración en cualquier punto de la trayectoria.
Datos del problema:
- Velocidad inicial: v0;
- Ángulo de tiro con la horizontal: θ0.
Tomamos un sistema de referencia con el eje Ox apuntando hacia la derecha y Oy hacia arriba, la aceleración de la gravedad está apuntando hacia abajo y el punto de disparo está en el origen del referencial (x0, y0) = (0, 0) (Figura 1).
Solución
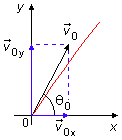
El movimiento puede ser proyectado a lo largo de los ejes x e y. Las componentes de la velocidad inicial v0 se dan en módulo por (Figura 2)
\[
\begin{gather}
v_{0x}=v_0\cos\theta_0 \tag{I}\\[5pt]
v_{0y}=v_0\operatorname{sen}\theta_0 \tag{II}
\end{gather}
\]
En la dirección x no hay aceleración actuando sobre el proyectil, está en
Movimiento Rectilíneo Uniforme (MRU), su movimiento está dado por la ecuación
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+vt}
\end{gather}
\]
\[
\begin{gather}
S_x=S_{0x}+v_x t
\end{gather}
\]
en el movimiento uniforme, vx = v0x es constante, podemos sustituir vx por el valor de (I) y S0x = 0
\[
\begin{gather}
S_x=0+(v_0\cos\theta_0)t\\[5pt]
S_x=v_0\cos\theta_0 t \tag{III}
\end{gather}
\]
En la dirección y, el proyectil está bajo la acción de la aceleración de la gravedad, es un
Movimiento Uniformemente Variado (MUV), representado por un lanzamiento vertical durante la
subida y una caída libre en la bajada, donde S0y = 0, v0y
está dada por la expresión (II) y a = −g es la aceleración de la gravedad que está en
dirección opuesta a la orientación de la trayectoria.
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+v_0 t+\frac{a}{2}t^2}
\end{gather}
\]
\[
\begin{gather}
S_y=S_{0y}+v_{0y}t-\frac{g}{2}t^2\\[5pt]
S_y=0+(v_0\operatorname{sen}\theta_0)t-\frac{g}{2}t^2\\[5pt]
S_y=v_0\operatorname{sen}\theta_0t-\frac{g}{2}t^2 \tag{IV}
\end{gather}
\]
La ecuación de la velocidad es dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=v_0+at}
\end{gather}
\]
\[
\begin{gather}
v_y=v_{0y}-gt\\[5pt]
v_y=v_0\operatorname{sen}\theta_0-gt \tag{V}
\end{gather}
\]
La ecuación de la velocidad en función de la aceleración y del desplazamiento es dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v^2=v_0^2+2a\Delta S}
\end{gather}
\]
\[
\begin{gather}
v_y^2=v_{0y}^2-2g\Delta S_y\\[5pt]
v_y^2=(v_0\operatorname{sen}\theta_0)^2-2g\Delta S_y\\[5pt]
v_y^2=v_0^2\operatorname{sen}^2\theta_0-2g\Delta S_y \tag{VI}
\end{gather}
\]
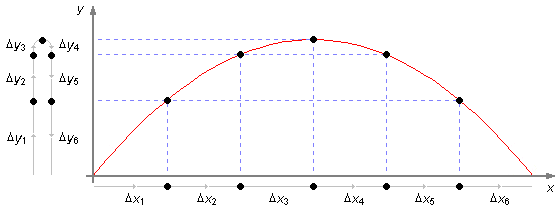
En la Figura 3 vemos que en el movimiento a lo largo de la dirección x, para intervalos de tiempos
iguales, tenemos desplazamientos iguales
(Δx1 = Δx2 = Δx3 =
Δx4 = Δx5 = Δx6).. En la dirección
y, durante la ascensión, para intervalos de tiempos iguales, tenemos desplazamientos menores, la
partícula está siendo frenada por la acción de la gravedad
(Δy1 > Δy2 > Δy3), hasta que la
velocidad vy se iguala a cero. Durante la caída, la gravedad comienza a jalar la partícula
de vuelta al suelo con velocidad acelerada, para intervalos de tiempos iguales, tenemos desplazamientos cada
vez mayores (Δy4 < Δy5 < Δy6).
a) Para encontrar la altura máxima, hmax, alcanzada por el proyectil, analizamos el movimiento a lo largo de la dirección y. Cuando el proyectil alcanza la altura máxima, su velocidad vy se iguala a cero, vy = 0, utilizando la ecuación (VI)
\[
\begin{gather}
0^2=v_0^2\operatorname{sen}\theta_0^2-2gh_{max}\\[5pt]
2gh_{max}=v_0^2\operatorname{sen}^2\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{h_{max}=\frac{v_0^2\operatorname{sen}^2\theta_0}{2g}}
\end{gather}
\]
b) El tiempo de ascenso, tA, para alcanzar la altura máxima se obtendrá de la ecuación (V) con la condición de que la velocidad se iguala a cero en la altura máxima alcanzada por el proyectil, vy = 0
\[
\begin{gather}
0=v_0\operatorname{sen}\theta_0-gt_A\\[5pt]
gt_A=v_0\operatorname{sen}\theta_0
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_A=\frac{v_0\operatorname{sen}\theta_0}{g}}
\end{gather}
\]
c) El tiempo total, tT, del movimiento será la suma de los tiempos de ascenso, tA, y de descenso, tD, siendo que en el movimiento de lanzamiento vertical y caída libre los tiempos de ascenso y de descenso son iguales, tenemos la condición
\[
\begin{gather}
t_T=t_A+t_D
\end{gather}
\]
con tA = tD
\[
\begin{gather}
t_T=2t_A
\end{gather}
\]
utilizando el resultado para el tiempo de ascenso obtenido en el ítem anterior
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t_T=2\frac{v_0\operatorname{sen}\theta_0}{g}}
\end{gather}
\]
d) El tiempo calculado anteriormente, para que el proyectil suba y baje, también es el tiempo que llevará para ir desde el origen hasta el punto Smax a lo largo del eje x, sustituyendo la respuesta del ítem anterior en la ecuación (III)
\[
\begin{gather}
S_{max}=\left(v_0\cos\theta_0\right)\left(2\frac{v_0\operatorname{sen}\theta_0}{g}\right)\\[5pt]
S_{max}=\frac{v_0^2}{g}2\operatorname{sen}\theta_0\cos\theta_0
\end{gather}
\]
De la Trigonometria
\[
\begin{gather}
\operatorname{sen}(\alpha+\alpha)=\operatorname{sen}\alpha\cos\alpha+\operatorname{sen}\alpha\cos\alpha\\[5pt]
\operatorname{sen}(2\alpha)=2\operatorname{sen}\alpha\cos\alpha
\end{gather}
\]
y sustituyendo esta identidad en la ecuación anterior, obtenemos el alcance máximo
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_0)}
\end{gather}
\]
e) Para obtener la ecuación de la trayectoria, indicada en la Figura 1, necesitamos tener y como función de x, o y = f(x), utilizando las ecuaciones (III) y (IV) para los movimientos en x e y recordando que S0x = S0y = 0, tenemos el sistema
\[
\left\{
\begin{array}{l}
S_x=v_0\cos\theta_0t\\
S_y=v_0\operatorname{sen}\theta_0t-\dfrac{g}{2}t^2
\end{array}
\right.
\]
aislando el tiempo en la primera ecuación
\[
\begin{gather}
t=\frac{S_x}{v_0\cos\theta_0}
\end{gather}
\]
sustituyendo este valor en la segunda ecuación
\[
\begin{gather}
S_y=v_0\operatorname{sen}\theta_0\left(\frac{S_x}{v_0\cos\theta_0}\right)-\frac{g}{2}\left(\frac{S_x}{v_0\cos\theta_0}\right)^2
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_y=-{\frac{g}{2v_0^2\cos^2\theta_0}S_x^2}+\frac{\operatorname{sen}\theta_0}{\cos\theta_0}S_x}
\end{gather}
\]
Haciendo la asociación mostrada abajo con una Ecuación de Segundo Grado del tipo
y = ax2+bx+c
\[
\begin{array}{c}
S_y & = & -{\dfrac{g}{2v_0^2\cos^2\theta_0}} & S_x^2 & + & \dfrac{\operatorname{sen}\theta_0}{\cos\theta_0} & S_x & + & 0 \\
{\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} & {\Large{\downarrow}} & & {\Large{\downarrow}} \\
y & = & a & x^2 & + & b & x & + & c \\
\end{array}
\]
vemos que hemos obtenido una función del tipo Sy = f(Sx) con el
coeficiente a < 0 lo que indica que nuestra trayectoria es una parábola con la "boca" hacia abajo.
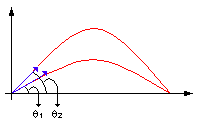
f) La respuesta obtenida en el ítem (d) para el alcance máximo, Smax, depende del ángulo inicial de lanzamiento, de trigonometría sabemos que la función seno varía de −1 a 1, el valor máximo del alcance ocurre cuando
\[
\begin{gather}
\operatorname{sen}(2\theta_0)=1\\[5pt]
2\theta_0=\operatorname{arc sen}(1)
\end{gather}
\]
De trigonometría, el seno cuyo arco vale 1 es
\[
\begin{gather}
\theta_0=\operatorname{arc sen}(1)=90°
\end{gather}
\]
\[
\begin{gather}
2\theta_0=90°\\[5pt]
\theta_0=\frac{90°}{2}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta_0=45°}
\end{gather}
\]
g) En trigonometría, tenemos que los ángulos complementarios son aquellos que suman 90° o \( \frac{\pi}{2} \), dos ángulos θ1 y θ2 complementarios
\[
\begin{gather}
\theta_1+\theta_2=\frac{\pi}{2} \tag{VII}
\end{gather}
\]
Usando el resultado del ítem (d) que da el alcance máximo, escribimos los alcances
Smax1 y Smax2 para los ángulos anteriores
\[
\begin{gather}
S_{max1}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_1) \tag{VIII}\\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_2) \tag{IX}
\end{gather}
\]
Escribiendo la expresión (VII) de θ2 en función de θ1
\[
\begin{gather}
\theta_2=\frac{\pi}{2}-\theta_1
\end{gather}
\]
y sustituyendo en la ecuación (IX)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}\left[2\left(\frac{\pi}{2}-\theta_1\right)\right]\\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}\left(\pi-2\theta_1\right)
\end{gather}
\]
De la Trigonometria
\[
\operatorname{sen}(\alpha-\beta)=\operatorname{sen}\alpha\cos\beta-\operatorname{sen}\beta\cos\alpha
\]
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left(\operatorname{sen}\pi\cos 2\theta_1-\operatorname{sen}2\theta_1\cos\pi\right)
\end{gather}
\]
siendo
\( \operatorname{sen}\pi=0 \),
\( \cos\pi=-1 \)
\[
\begin{gather}
S_{max2}=\frac{v_0^2}{g}\left[0.\cos2\theta_1-\operatorname{sen}2\theta_1.(-1)\right]\\[5pt]
S_{max2}=\frac{v_0^2}{g}\operatorname{sen}(2\theta_1) \tag{X}
\end{gather}
\]
comparando las ecuaciones (VIII) y (X)
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_{max1}=S_{max2}} \tag{Q.E.D}
\end{gather}
\]
Observação: Q.E.D. es la abreviación de la expresión en latín
"quod erat demonstrandum" que significa "lo que se quería demostrar".
h) En un punto cualquiera de la trayectoria, las componentes del vector velocidad,
\( \vec v \),
pueden ser proyectadas a lo largo de los ejes x y y,
\( {\vec v}_x \)
e
\( {\vec v}_y \),
(Figura 5-A).
El vector velocidad será la suma vectorial de sus componentes
El vector velocidad será la suma vectorial de sus componentes
\[
\begin{gather}
\vec v={\vec v}_x+{\vec v}_y
\end{gather}
\]
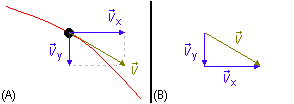
En la Figura 5-B vemos que los vectores forman un triángulo rectángulo y el módulo de la velocidad puede ser calculado aplicando el Teorema de Pitágoras
\[
\begin{gather}
v^2=v_x^2+v_y^2 \tag{XI}
\end{gather}
\]
utilizando vx = v0x de la expresión (I), y vy
de la ecuación (V)
\[
\begin{gather}
v^2=(v_0\cos\theta_0)^2+(v_0\operatorname{sen}\theta_0-gt)^2\\[5pt]
v^2=v_0^2\cos^2\theta_0+v_0^2\operatorname{sen}^2\theta_0-2v_0\operatorname{sen}\theta_0gt+g^2t^{2}
\end{gather}
\]
en los dos primeros términos del lado derecho de la igualdad factorizamos
\( v_0^2 \)
y en el tercer y cuarto términos factorizamos −2g
\[
\begin{gather}
v^2=v_0^2\left(\cos^2\theta_0+\operatorname{sen}^2\theta_0\right)-2g\left(v_0\operatorname{sen}\theta_0t-g\frac{t^2}{2}\right) \tag{XII}
\end{gather}
\]
De la Trigonometria
\[
\begin{gather}
\cos^2\alpha+\operatorname{sen}^2\alpha=1
\end{gather}
\]
en el primer término entre paréntesis aplicamos la identidad trigonométrica arriba, el segundo término entre paréntesis puede ser obtenido de la ecuación (IV) de la posición en la dirección y con S0 = S0y
\[
\begin{gather}
S_y-S_{0y}=v_0\operatorname{sen}\theta_0t-\frac{g}{2}t^2
\end{gather}
\]
siendo
\( \Delta S_y=S_y-S_{0y} \),
así la ecuación (XII) puede ser escrita
\[
\begin{gather}
v^2=v_0^2-2g\Delta S_y
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
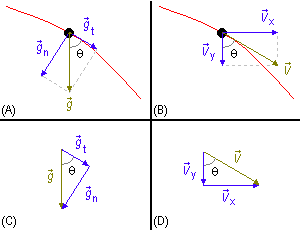
i) La aceleración de la gravedad, \( \vec g \), a la que está sujeto el proyectil en cualquier punto de la trayectoria se puede proyectar en la aceleración tangencial, \( {\vec g}_t \), y en la aceleración normal, \( {\vec g}_n \), que es perpendicular a la trayectoria en el punto considerado (Figura 6-A). De la Figura 6-C
\[
\begin{gather}
\cos\theta =\frac{g_t}{g}\\[5pt]
g_t=g\cos\theta \tag{XIII}
\end{gather}
\]
\[
\begin{gather}
\operatorname{sen}\theta =\frac{g_n}{g}\\[5pt]
g_n=g\operatorname{sen}\theta \tag{XIV}
\end{gather}
\]
donde θ es el ángulo entre la aceleración de la gravedad,
\( \vec g \),
y su componente tangencial,
\( {\vec g}_t \),
en un punto cualquiera de la trayectoria. Pero este ángulo es el mismo que tenemos entre la velocidad
del proyectil,
\( \vec v \),
y su componente a lo largo de la dirección y,
\( {\vec v}_y \),
(Figura 6-B).
Por la Figura 6-D
Por la Figura 6-D
\[
\begin{gather}
\cos\theta =\frac{v_y}{v}
\end{gather}
\]
utilizando el resultado del ítem anterior para el valor de la velocidad
\[
\begin{gather}
\cos\theta =\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
sustituyendo este valor del coseno en la expresión (XIII), la aceleración tangencial será
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_t=g\frac{v_y}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
De la misma forma de la Figura 6-D
\[
\begin{gather}
\operatorname{sen}\theta =\frac{v_x}{v}\\[5pt]
\operatorname{sen}\theta=\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}
\end{gather}
\]
y sustituyendo en la expresión (XIV) para la aceleración normal
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{g_n=g\frac{v_x}{\sqrt{v_0^2-2g\Delta S_y}}}
\end{gather}
\]
publicidad

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .