Exercice Résolu sur les Mouvement Relatif
publicité
Un bateau naviguant à une vitesse constante de 10,8 km/h souhaite traverser perpendiculairement une rivière dont le courant a une vitesse constante de 1,5 m/s.
a) Dans quelle direction le pilote devrait-il maintenir l'axe longitudinal du bateau par rapport à la normale avec le courant?
b) Quelle est la vitesse du bateau par rapport à la rive de la rivière?
Données du problème:
- Module de la vitesse du bateau par rapport à la rivière: vb/r = 10,8 km/h;
- Module de la vitesse de la rivière par rapport à la rive: vr = 1,5 m/s.
Solution
Premièrement, nous devons convertir la vitesse du bateau donnée en kilomètres par heure (km/h) en mètres par seconde (m/s), utilisée dans le Système International d'Unités (SI)
\[
\begin{gather}
v_{b/r}=10,8\;\mathrm{\frac{\cancel{km}}{1\cancel h}}\times\frac{1\;\mathrm{\cancel h}}{3600\;\mathrm s}\times\frac{1000\;\mathrm m}{1\;\mathrm{\cancel{km}}}=\frac{10,8}{3,6}\;\mathrm{\frac{m}{s}}=3\;\mathrm{m/s}
\end{gather}
\]
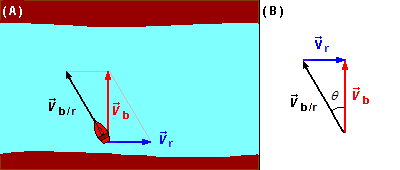
a) Nous voyons que (Figure 1-A), si
\( {\vec v}_r \)
est le vecteur vitesse des eaux de la rivière, le vecteur normal à ce vecteur sera donné par le vecteur
\( {\vec v}_b \).
Par rapport au vecteur
\( {\vec v}_b \),
le bateau doit maintenir une direction donnée par le vecteur
\( {\vec v}_{b/r} \)
qui forme un angle θ avec
\( {\vec v}_b \)
(Figure 1-B). Le problème nous donne le côté
\( {\vec v}_r \)
et l'hypoténuse
\( {\vec v}_{b/r} \)
du triangle rectangle de la figure, l'angle θ sera
\[
\begin{gather}
\operatorname{sen}\theta =\frac{\text{côté opposé}}{\text{hypoténuse}}=\frac{v_r}{v_{b/r}}=\frac{1,5}{3}=\frac{1}{2}
\end{gather}
\]
En Trigonométrie, l'angle θ sera l'arc dont le sinus est
\( \frac{1}{2} \)
\[
\begin{gather}
\theta =\operatorname{arcsen}\left(\frac{1}{2}\right)=30°
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta=30°}
\end{gather}
\]
b) En appliquant le Théorème de Pythagore au triangle de la Figure 1-B, où \( {\vec v}_{b/r} \) est l'hypoténuse, \( {\vec v}_r \) et \( {\vec v}_b \) sont les côtés adjacents
\[
\begin{gather}
\bbox[#99CCFF,10px]
{{\vec v}_b={\vec v}_r+{\vec v}_{b/r}}
\end{gather}
\]
le module sera
\[
\begin{gather}
v_{b/r}^2=v_r^2+v_b^2\\[5pt]
v_b^2=v_{b/r}^2-v_r^2\\[5pt]
v_b^2=3^2-1,5^2\\[5pt]
v_b^2=9-2,25\\[5pt]
v_b=\sqrt{6,25\;}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v_{b}=2,6\;\mathrm{m/s}}
\end{gather}
\]
publicité

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .