Ejercicio Resuelto sobre Movimiento Relativo
publicidad
Un barco que desarrolla una velocidad constante de 10,8 km/h desea cruzar perpendicularmente un río cuyas aguas tienen una velocidad constante de 1,5 m/s.
a) ¿En qué dirección debería el piloto mantener el eje longitudinal del barco en relación con la normal a la corriente?
b) ¿Cuál es la velocidad del barco con respecto a la orilla del río?
Datos del problema:
- Módulo de la velocidad del barco con respecto al río: vb/a = 10,8 km/h;
- Módulo de la velocidad del río con respecto a la orilla: va = 1,5 m/s.
Solución
En primer lugar, debemos convertir la velocidad del barco dada en kilómetros por hora (km/h) a metros por segundo (m/s), que es la unidad utilizada en el Sistema Internacional de Unidades (SI)
\[
\begin{gather}
v_{b/a}=10,8\;\mathrm{\frac{\cancel{km}}{1\cancel h}}\times\frac{1\;\mathrm{\cancel h}}{3600\;\mathrm s}\times\frac{1000\;\mathrm m}{1\;\mathrm{\cancel{km}}}=\frac{10,8}{3,6}\;\mathrm{\frac{m}{s}}=3\;\mathrm{m/s}
\end{gather}
\]
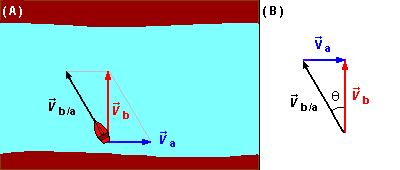
a) Observamos que (Figura 1-A), si
\( {\vec v}_a \)
es el vector velocidad de las aguas del río, el vector normal a este vector estará dado por el vector
\( {\vec v}_b \).
En relación al vector
\( {\vec v}_b \),
el barco debe mantener una dirección dada por el vector
\( {\vec v}_{b/a} \)
que forma un ángulo θ con
\( {\vec v}_b \)
(Figura 1-B). El problema nos proporciona el cateto
\( {\vec v}_a \)
y la hipotenusa
\( {\vec v}_{b/a} \)
del triángulo rectángulo de la figura, entonces el ángulo θ será
\[
\begin{gather}
\operatorname{sen}\theta =\frac{\text{cateto opuesto}}{\text{hipotenusa}}=\frac{v_a}{v_{b/a}}=\frac{1,5}{3}=\frac{1}{2}
\end{gather}
\]
Por Trigonometría, el ángulo θ será el arco cuyo seno es
\( \frac{1}{2} \)
\[
\begin{gather}
\theta =\operatorname{arcsen}\left(\frac{1}{2}\right)=30°
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\theta=30°}
\end{gather}
\]
b) Aplicando el Teorema de Pitágoras al triángulo de la Figura 1-B, donde \( {\vec v}_{b/a} \) es la hipotenusa, \( {\vec v}_a \) y \( {\vec v}_b \) son los catetos
\[
\begin{gather}
\bbox[#99CCFF,10px]
{{\vec v}_b={\vec v}_a+{\vec v}_{b/a}}
\end{gather}
\]
el módulo será
\[
\begin{gather}
v_{b/a}^2=v_a^2+v_b^2\\[5pt]
v_b^2=v_{b/a}^2-v_a^2\\[5pt]
v_b^2=3^2-1,5^2\\[5pt]
v_b^2=9-2,25\\[5pt]
v_b=\sqrt{6,25\;}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v_{b}=2,6\;\mathrm{m/s}}
\end{gather}
\]
publicidad

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .