Um operário segura uma das extremidades de uma tábua reta, de comprimento a, enquanto a outra
extremidade se apoia sobre um tambor cilíndrico de maneira que a tábua fique na posição horizontal. Ao
mover a tábua para frente, o operário faz o tambor rolar, sem escorregar ao longo do plano horizontal e
durante o deslocamento a tábua permaneçe na horizontal. Determine a distância d que irá percorrer
o operário até que a extremidade segura por ele toque o tambor.
Dado do problema:
Solução:
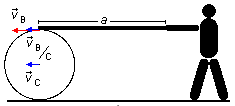
Vamos chamar
\( {\vec v}_c \)
a velocidade do centro do tambor em relação ao solo,
\( {\vec v}_{b/c} \)
a velocidade do ponto de contato entre o tambor e a tábua em relação ao centro do tambor e
\( {\vec v}_b \)
a velocidade do ponto de contato entre o tambor e a tábua em relação ao solo (Figura 1). Adotamos
v para a velocidade do centro do tambor, a velocidade do ponto de contato em relação ao centro
também será v (se esta velocidade fosse maior ou menor o tambor se deformaria), então podemos
calcular a velocidade do ponto de contato em relação ao solo
\[
\begin{gather}
{\vec v}_b={\vec v}_c+{\vec v}_{b/c}
\end{gather}
\]
como todos os vetores têm a mesma direção, em módulo
\[
\begin{gather}
v_b=v+v \\[5pt]
v_b=2v
\end{gather}
\]
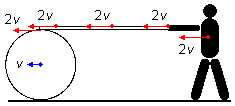
Como a tábua passa pelo tambor sem escorregar todos os pontos da tábua têm a mesma velocidade 2v que
o ponto de contato. O ponto de contato do operário com a tábua também tem a velocidade de 2v, o
próprio operário se move com velocidade de 2v (Figura 2).
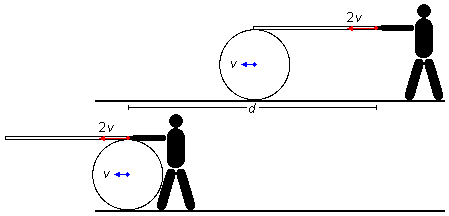
O problema começa com uma ponta da tábua sendo segura pelo operário e a outra ponta apoiada no tambor, este
ponto de apoio está exatamente sobre o centro do tambor (Figura 3). O problema termina quando a mão do
operário está em contato com o tambor, neste momento ela estará sobre o centro do tambor.
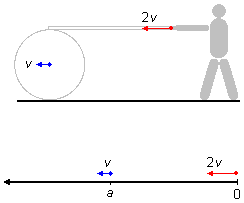
Então podemos “esquecer” o operário, o tambor e a tábua (Figura 4) e reduzir o problema ao encontro de
dois pontos materiais. Adotamos um sistema de referência orientado para a esquerda (ao contrário do
que se faz usualmente), um ponto representa a mão do operário partindo da origem
S0h = 0 com velocidade inicial
v0h =
vh = 2
v e outro ponto representando o centro do
tambor que parte de um ponto
S0c =
a com velocidade
v0c =
vc =
v. Como as velocidades dos pontos são constantes
eles estão em
Movimento Retilíneo Uniforme (
M.R.U.), a equação desse movimento é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S=S_0+vt}
\end{gather}
\]
escrevendo esta equação para os dois pontos
\[
\begin{gather}
S_h=S_{0 h}+v_ht \\[5pt]
S_h=0+2vt \\[5pt]
S_h=2vt \tag{I}
\end{gather}
\]
\[
\begin{gather}
S_c=S_{0 c}+v_ct \\[5pt]
S_c=a+vt \tag{II}
\end{gather}
\]
para que eles se encontrem devem ocupar a mesma posição, então devemos impor a condição
\[
\begin{gather}
S_h=S_c
\end{gather}
\]
igualando as equações (I) e (II) obtemos o tempo que leva para os pontos se encontrarem
\[
\begin{gather}
2vt=a+vt \\[5pt]
2vt-vt=a \\[5pt]
a=vt \\[5pt]
t=\frac{a}{v} \tag{III}
\end{gather}
\]
substituindo a expressão (III) na equação (I) temos a distância percorrida pelo homem
\[
\begin{gather}
S_h=2\cancel v \frac{a}{\cancel v}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_h=2a}
\end{gather}
\]