Exercício Resolvido de Equação de Lagrange
publicidade
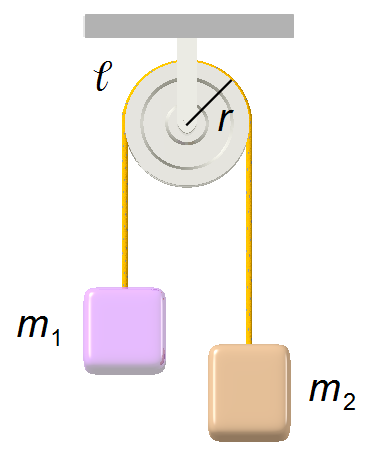
Uma máquina de Atwood possui massas m1 e m2
(m2 > m1) ligadas por uma corda ideal de comprimento
ℓ, inextensível e de massa desprezível, através de uma polia de raio r de massa
desprezível e sem atrito. Determine:
a) A aceleração do sistema em função do tempo;
b) A velocidade do sistema em função do tempo;
c) A equação de movimento em função do tempo.
a) A aceleração do sistema em função do tempo;
b) A velocidade do sistema em função do tempo;
c) A equação de movimento em função do tempo.
- Massa do bloco 1: m1;
- Massa do bloco 2: m2.
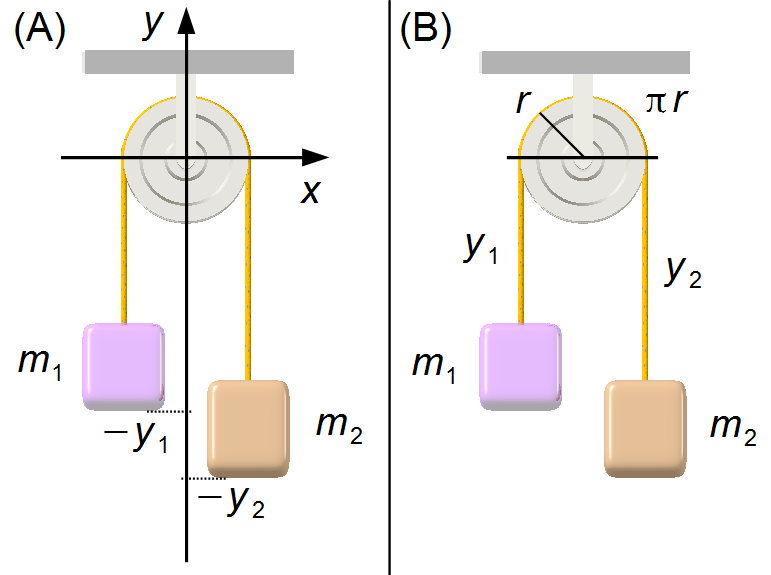
Adotamos um sistema de referência no centro da polia. A posição do bloco 1 é igual à
−y1 e a posição do bloco 2 é igual −y2
(Figura 1-A).
O comprimento ℓ da corda é dado pela soma dos segmentos y1 e y2 que sustentam os blocos e pelo segmento na parte superior da polia, A borda da polia é uma circunferência de raio r, seu comprimento é igual à \( \frac{C}{2}=\frac{2\pi r}{2}=\pi r \), a parte superior é metade da circunferência, \( \ell=y_{1}+y_{2}+\pi r \) (Figura 1-B). O comprimento da corda é dado por
O comprimento ℓ da corda é dado pela soma dos segmentos y1 e y2 que sustentam os blocos e pelo segmento na parte superior da polia, A borda da polia é uma circunferência de raio r, seu comprimento é igual à \( \frac{C}{2}=\frac{2\pi r}{2}=\pi r \), a parte superior é metade da circunferência, \( \ell=y_{1}+y_{2}+\pi r \) (Figura 1-B). O comprimento da corda é dado por
\[
\begin{gather}
\ell=y_{1}+y_{2}+\pi r \tag{I}
\end{gather}
\]
esta é uma equação de vínculo.
Observação 1: O número de graus de liberdade do sistema é f = 1. O número de graus
de liberdade é dado por
Neste caso da máquina de Atwood simples, temos N = 2, representando os dois blocos.
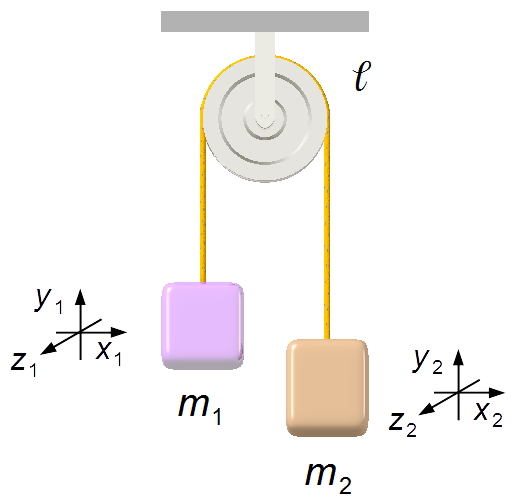 Figura 2
estas quatro equações juntamente com a equação (I) formam um conjunto de cinco equações de vínculos,
assim K = 5 e o número de graus de liberdade do sistema
Figura 2
estas quatro equações juntamente com a equação (I) formam um conjunto de cinco equações de vínculos,
assim K = 5 e o número de graus de liberdade do sistema
\[
\begin{gather}
f=3N-K
\end{gather}
\]
onde N é o número de partículas do sistema e K é o número de equações de vínculos.Neste caso da máquina de Atwood simples, temos N = 2, representando os dois blocos.
O movimento dos dois blocos está na direção y, não há movimento nas direções x e
z (Figura 2), as equações de vínculos são
\[
\begin{gather}
x_{1}=0\\[5pt]
z_{1}=0\\[5pt]
x_{2}=0\\[5pt]
z_{2}=0
\end{gather}
\]
\[
\begin{gather}
f=3.2-5\\[5pt]
f=1
\end{gather}
\]
Observação 2: Em algumas soluções deste problema a equação de vínculo (I) é escrita como
\( \ell=y_{1}+y_{2} \).
O termo πr é omitido, como ele é constante ele desaparece nos cálculos subsequentes.
Solução
a) A Lagrangiana de um sistema é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{L=T-V} \tag{II}
\end{gather}
\]
A energia cinética é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{T=\frac{1}{2}mv^{2}}
\end{gather}
\]
escrevendo a energia cinética dos dois blocos
\[
\begin{gather}
T_{1}=\frac{1}{2}m_{1}{\dot{y}}_{1}^{2} \tag{III}
\end{gather}
\]
\[
\begin{gather}
T_{2}=\frac{1}{2}m_{2}{\dot{y}}_{2}^{2} \tag{IV}
\end{gather}
\]
derivando a expressão (I) em relação a t
\[
\begin{gather}
\underbrace{\frac{d\left(\ell\right)}{dt}}_{0}=\frac{d\left(y_{1}\right)}{dt}+\frac{d\left(y_{2}\right)}{dt}+\underbrace{\frac{d\left(\pi r\right)}{dt}}_{0}\\[5pt]
{\dot{y}}_{1}+{\dot{y}}_{2}=0\\[5pt]
{\dot{y}}_{2}=-{\dot{y}}_{1} \tag{V}
\end{gather}
\]
como o comprimento da corda, ℓ, e o semicírculo em volta da polia, πr são constantes
suas derivadas são iguais à zero. Substituindo a expressão (V) na expressão (IV)
\[
\begin{gather}
T_{2}=\frac{1}{2}m_{2}\left(-{\dot{y}}_{1}\right)^{2}\\[5pt]
T_{2}=\frac{1}{2}m_{2}{\dot{y}}_{1}^{2} \tag{VI}
\end{gather}
\]
somando as expressões (III) e (VI)
\[
\begin{gather}
T=T_{1}+T_{2}\\[5pt]
T=\frac{1}{2}m_{1}{\dot{y}}_{1}^{2}+\frac{1}{2}m_{2}{\dot{y}}_{1}^{2}\\[5pt]
T=\frac{{\dot{y}}_{1}^{2}}{2}\left(m_{1}+m_{2}\right) \tag{VII}
\end{gather}
\]
A energia potencial é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{U=mgx}
\end{gather}
\]
escrevendo a energia potencial dos dois blocos
\[
\begin{gather}
U_{1}=-m_{1}gy_{1} \tag{VIII}
\end{gather}
\]
\[
\begin{gather}
U_{2}=-m_{2}gy_{2} \tag{IX}
\end{gather}
\]
usando a expressão (I), escrevemos y2 em função de y1
\[
\begin{gather}
y_{2}=\ell-y_{1}-\pi r \tag{X}
\end{gather}
\]
substituindo a expressão (X) na expressão (IX)
\[
\begin{gather}
U_{2}=-m_{2}g\left(\ell-y_{1}-\pi r\right) \tag{XI}
\end{gather}
\]
somando as expressões (VIII) e (XI)
\[
\begin{gather}
U=-m_{1}gy_{1}-m_{2}g\left(\ell-y_{1}-\pi r\right)\\[5pt]
U=-m_{1}gy_{1}+m_{2}gy_{1}-m_{2}g\left(\ell-\pi r\right)\\[5pt]
U=gy_{1}\left(m_{2}-m_{1}\right)-m_{2}g\left(\ell-\pi r\right) \tag{XII}
\end{gather}
\]
Substituindo as expressões (VII) e (XII) na expressão (II)
\[
\begin{gather}
L=\frac{{\dot{y}}_{1}^{2}}{2}\left(m_{1}+m_{2}\right)-gy_{1}\left(m_{2}-m_{1}\right)+m_{2}g\left(\ell-\pi r\right)
\end{gather}
\]
como o sistema depende de uma única variável, escrevemos y = y1
\[
\begin{gather}
L=\frac{{\dot{y}}^{2}}{2}\left(m_{1}+m_{2}\right)-gy\left(m_{2}-m_{1}\right)+m_{2}g\left(\ell-\pi r\right) \tag{XIII}
\end{gather}
\]
A Equação de Lagrange é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\frac{d}{dt}\left(\frac{\partial L}{\partial{\dot{q}}_{j}}\right)-\frac{\partial L}{\partial q_{j}}=0} \tag{XIV}
\end{gather}
\]
temos uma variável, j = 1, fazendo
\( q_{1}=y \)
e
\( \dot{q}_{1}=\dot{y} \)
\[
\begin{gather}
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{y}}\right)-\frac{\partial L}{\partial y}=0 \tag{XV}
\end{gather}
\]
- Derivada de \( \displaystyle \frac{\partial L}{\partial y} \)
\[
\begin{gather}
\frac{\partial L}{\partial y}=\frac{\partial }{\partial y}\left[\frac{{\dot{y}}^{2}}{2}\left(m_{1}+m_{2}\right)-gy\left(m_{2}-m_{1}\right)+m_{2}g\left(\ell-\pi r\right)\right]\\[5pt]
\frac{\partial L}{\partial y}=\underbrace{\frac{\partial }{\partial y}\left[\frac{{\dot{y}}^{2}}{2}\left(m_{1}+m_{2}\right)\right]}_{0}-\frac{\partial}{\partial y}\left[gy\left(m_{2}-m_{1}\right)\right]+\underbrace{\frac{\partial}{\partial y}\left[m_{2}g\left(\ell-\pi r\right)\right]}_{0}\\[5pt]
\frac{\partial L}{\partial y}=-g\left(m_{2}-m_{1}\right)\\[5pt]
\frac{\partial L}{\partial y}=g\left(m_{1}-m_{2}\right)x \tag{XVI}
\end{gather}
\]
no primeiro e no terceiro termos não aparece a variável y, o primeiro termo depende de
\( \dot y \)
e no terceiro termo todos os fatores são constantes.
- Derivada de \( \displaystyle \frac{\partial L}{\partial \dot{y}} \)
\[
\begin{gather}
\frac{\partial L}{\partial \dot{y}}=\frac{\partial}{\partial \dot y}\left[\frac{{\dot{y}}^{2}}{2}\left(m_{1}+m_{2}\right)-gy\left(m_{1}-m_{2}\right)-m_{2}g\left(\ell-\pi r\right)\right]\\[5pt]
\frac{\partial L}{\partial \dot{y}}=\frac{\partial}{\partial \dot y}\left[\frac{{\dot{y}}^{2}}{2}\left(m_{1}+m_{2}\right)\right]-\underbrace{\frac{\partial}{\partial \dot y}\left[gy\left(m_{1}-m_{2}\right)\right]}_{0}-\underbrace{\frac{\partial}{\partial \dot y}\left[m_{2}g\left(\ell-\pi r\right)\right]}_{0}\\[5pt]
\frac{\partial L}{\partial \dot y}=\frac{\cancel{2}\dot{y}}{\cancel{2}}\left(m_{1}+m_{2}\right)\\[5pt]
\frac{\partial L}{\partial \dot y}=\dot{y}\left(m_{1}+m_{2}\right) \tag{XVIII}
\end{gather}
\]
no segundo e no terceiro termos não aparece a variável
\( \dot{y} \),
o segundo termo depende de y e no terceiro termo todos os fatores são constantes.
- Derivada de \( \displaystyle \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{y}}\right) \)
\[
\begin{gather}
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{y}}\right)=\frac{d}{dt}\left[\dot{y}\left(m_{1}+m_{2}\right)\right]\\[5pt]
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{y}}\right)=\ddot{y}\left(m_{1}+m_{2}\right) \tag{XIX}
\end{gather}
\]
Substituindo as expressões (XVI) e (XIX) na expressão (XV)
\[
\begin{gather}
\ddot{y}\left(m_{1}+m_{2}\right)-g\left(m_{1}-m_{2}\right)=0\\[5pt]
\ddot{y}\left(m_{1}+m_{2}\right)=g\left(m_{1}-m_{2}\right)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\ddot{y}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}}
\end{gather}
\]
b) A aceleração é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{a=\frac{dv}{dt}}
\end{gather}
\]
escrevendo
\( a=\ddot{y} \)
e
\( v=\dot{y} \)
\[
\begin{gather}
\ddot{y}=\frac{d\dot{y}}{dt}
\end{gather}
\]
substituindo a aceleração encontrada no item anterior nessa expressão
\[
\begin{gather}
\frac{d\dot{y}}{dt}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}
\end{gather}
\]
integrando ambos os lados da equação em dt
\[
\begin{gather}
\int \frac{d\dot{y}}{dt}\;dt=\int \frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;dt\\[5pt]
\int d\dot{y}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\int dt
\end{gather}
\]
os limites de integração são v0, a velocidade no instante inicial, e
\( \dot{y} \),
a velocidade em um instante qualquer em
\( d\dot{y} \),
e 0, o instante inicial, e t um instante qualquer em dt
\[
\begin{gather}
\int_{v_{0}}^{\dot{y}}d\dot{y}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;\int_{0}^{t}dt\\[5pt]
\left.\dot{y}\;\right|_{\;v_{0}}^{\;\dot{y}}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\left.\;t\;\right|_{\;0}^{\;t}\\[5pt]
\dot{y}-v_{0}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\left(t-0\right)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\dot{y}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;t+v_{0}}
\end{gather}
\]
c) A velocidade é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v=\frac{dy}{dt}}
\end{gather}
\]
escrevendo
\( v=\dot{y} \)
\[
\begin{gather}
\dot{y}=\frac{dy}{dt}
\end{gather}
\]
substituindo a velocidade encontrada no item anterior nessa expressão
\[
\begin{gather}
\frac{dy}{dt}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;t+v_{0}
\end{gather}
\]
integrando ambos os lados da equação em dt
\[
\begin{gather}
\int \frac{dy}{dt}\;dt=\int\left[\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}t+v_{0}\right]\;dt\\[5pt]
\int dy=\int \frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}t\;dt+\int v_{0}\;dt\\[5pt]
\int dy=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\int t\;dt+v_{0}\int\;dt
\end{gather}
\]
os limites de integração são y0, a posição no instante inicial, e y, a posição em
um instante qualquer em dy, e 0, o instante inicial, e t um instante qualquer em dt
\[
\begin{gather}
\int_{y_{0}}^{y}dy=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;\int_{0}^{t}t\;dt+v_{0}\;\int_{0}^{t}dt\\[5pt]
\left.y\;\right|_{\;y_{0}}^{\;y}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\left.\;\frac{t^{2}}{2}\;\right|_{\;0}^{\;t}+v_{0}\left.\;t\;\right|_{\;0}^{\;t}\\[5pt]
y-y_{0}=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;\left(\frac{t^{2}}{2}-0 \right)+v_{0}(t-0)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{y=\frac{g\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}}\;\frac{t^{2}}{2}+v_{0}t+y_{0}}
\end{gather}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .