Solved Problem on Gauss's Law
advertisement
Determine the magnitude of the electric field produced by a thin spherical shell, of radius R and electric charge Q>0, everywhere in the space.
Problem data:
- Radius of spherical shell: R.
- Charge of the spherical shell: Q.
To determine the magnitude of the electric field everywhere in space, we must consider the points inside the spherical shell, r ≤ R, and points outside the spherical shell, r > R, (Figure 1).
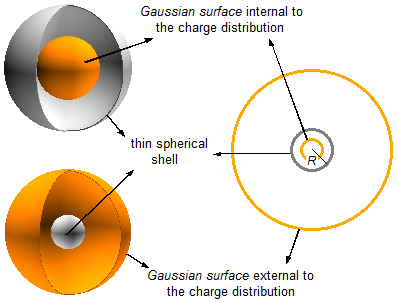
We construct an internal Gaussian Surface and another surface external to the spherical shell.
Solution
- For r ≤ R:
\[ \bbox[#FFCCCC,10px]
{E=0}
\]
- For r > R:
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\oint_{A}{\mathbf{E}}.d\mathbf{A}=\frac{q}{\epsilon_{0}}} \tag{I}
\end{gather}
\]
The electric field spreads radially from the charge distribution in the er
direction, and in each surface area element dA, we have a unit vector n perpendicular to the
surface and oriented outwards. Thus, at each point on the surface, the electric field vector E and
the unit vector n have the same direction (Figure 2).

The electric field vector only has a component in the er direction, it can be written as
\[
\begin{gather}
\mathbf{E}=E{\;\mathbf{e}}_{r} \tag{II}
\end{gather}
\]
The area element vector can be written as
\[
\begin{gather}
d\mathbf{A}=dA\;\mathbf{n} \tag{III}
\end{gather}
\]
substituting expressions (II) and (III) into expression (I)
\[
\begin{gather}
\oint_{A}E\;{\mathbf{e}}_{r}.dA\;\mathbf{n}=\frac{q}{\epsilon_{0}}\\
\oint_{A}E\;dA\;\underbrace{{\mathbf{e}}_{r}.\mathbf{n}}_{1}=\frac{q}{\epsilon_{0}}
\end{gather}
\]
Note: As er and n are unit vectors, their magnitudes are
equal to 1, and as both are in the same direction, the angle between them is zero, θ=0,
\( {\mathbf{e}}_{r}.\mathbf{n}=|\;\mathbf{e}_{r}\;|\;|\;\mathbf{n}\;|\;\cos 0=1\times 1\times 1=1 \)
\[ {\mathbf{e}}_{r}.\mathbf{n}=|\;\mathbf{e}_{r}\;|\;|\;\mathbf{n}\;|\;\cos 0=1\times 1\times 1=1 \]
.
\[
\begin{gather}
\oint _{A}E\;dA=\frac{q}{\epsilon_{0}} \tag{IV}
\end{gather}
\]
Converting from spherical coordinates to Cartesian coordinates x, y, and z are given by
\[
\left\{
\begin{array}{l}
x=r\sin \theta \cos \phi\\
y=r\sin \theta \sin \phi\\
z=r\cos \theta
\end{array}
\right. \tag{V}
\]
To obtain the area element, we calculate the Jacobian given by the determinant
\[
J=\left|
\begin{matrix}
\;\dfrac{\partial x}{\partial r}&\dfrac{\partial x}{\partial \theta}&\dfrac{\partial x}{\partial \phi}\;\\
\;\dfrac{\partial y}{\partial r}&\dfrac{\partial y}{\partial \theta}&\dfrac{\partial y}{\partial \phi}\;\\
\;\dfrac{\partial z}{\partial r}&\dfrac{\partial z}{\partial \theta}&\dfrac{\partial z}{\partial \phi}\;
\end{matrix}
\right|
\]
Calculation of the partial derivatives of the functions x, y, and z given in (V)
\( x=r\sin \theta \cos \phi \):
\( \dfrac{\partial x}{\partial r}=\dfrac{\partial (r\sin \theta \cos\phi )}{\partial r}=\sin \theta \cos \phi \;\dfrac{\partial r}{\partial r}=\sin \theta \cos \phi \times 1=\sin \theta \cos \phi \),
\( \dfrac{\partial x}{\partial \theta}=\dfrac{\partial (r\sin \theta\cos \phi)}{\partial \theta}=r\cos \phi \dfrac{\partial(\sin \theta)}{\partial \theta}=r\cos \theta \cos \phi \),
\( \dfrac{\partial x}{\partial \phi }=\dfrac{\partial (r\sin \theta \cos\phi)}{\partial \phi}=r\sin \theta \dfrac{\partial (\cos \phi)}{\partial \phi}=r\sin \theta (-\sin \phi)=-r\sin \theta \sin \phi \),
\( y=r\sin \theta \sin \phi \):
\( \dfrac{\partial y}{\partial r}=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial r}=\sin \theta \sin \phi\dfrac{\partial r}{\partial r}=\sin \theta \sin \phi \times 1=\sin \theta \sin \phi \),
\( \dfrac{\partial y}{\partial \theta }=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial \theta}=r\sin \phi \dfrac{\partial(\sin \theta)}{\partial \theta}=r\cos \theta \sin \phi \),
\( \dfrac{\partial y}{\partial \phi}=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial \phi}=r\sin \theta \dfrac{\partial(\sin \phi)}{\partial \phi }=r\sin \theta \cos \phi \),
\( z=r\cos \theta \):
\( \dfrac{\partial z}{\partial r}=\dfrac{\partial (r\cos \theta )}{\partial r}=\cos \theta \dfrac{\partial r}{\partial r}=\cos \theta \times 1=\cos \theta \),
\( \dfrac{\partial z}{\partial \theta}=\dfrac{\partial (r\cos \theta)}{\partial \theta}=r\dfrac{\partial (\cos \theta)}{\partial \theta}=r(-\sin \theta )=-r\sin \theta \),
\( \dfrac{\partial z}{\partial \phi}=\dfrac{\partial (r\cos \theta)}{\partial \phi}=0 \), the function z does not depend on ϕ, in the derivative with respect ϕ the values of r e θ are constants, and the derivative of a constant is zero.
\( x=r\sin \theta \cos \phi \):
\( \dfrac{\partial x}{\partial r}=\dfrac{\partial (r\sin \theta \cos\phi )}{\partial r}=\sin \theta \cos \phi \;\dfrac{\partial r}{\partial r}=\sin \theta \cos \phi \times 1=\sin \theta \cos \phi \),
\[ \dfrac{\partial x}{\partial r}=\dfrac{\partial (r\sin \theta \cos\phi )}{\partial r}=\sin \theta \cos \phi \;\dfrac{\partial r}{\partial r}=\sin \theta \cos \phi \times 1=\sin \theta \cos \phi \]
in the derivative with respect to r, the values of θ and ϕ are constant, and the sine
and cosine are moved out of the derivative.
\( \dfrac{\partial x}{\partial \theta}=\dfrac{\partial (r\sin \theta\cos \phi)}{\partial \theta}=r\cos \phi \dfrac{\partial(\sin \theta)}{\partial \theta}=r\cos \theta \cos \phi \),
\[ \dfrac{\partial x}{\partial \theta}=\dfrac{\partial (r\sin \theta\cos \phi)}{\partial \theta}=r\cos \phi \dfrac{\partial(\sin \theta)}{\partial \theta}=r\cos \theta \cos \phi \]
in the derivative with respect θ, the values of r and ϕ are constant, and the term at
r and the sine are moved out of the derivative.
\( \dfrac{\partial x}{\partial \phi }=\dfrac{\partial (r\sin \theta \cos\phi)}{\partial \phi}=r\sin \theta \dfrac{\partial (\cos \phi)}{\partial \phi}=r\sin \theta (-\sin \phi)=-r\sin \theta \sin \phi \),
\[ \dfrac{\partial x}{\partial \phi }=\dfrac{\partial (r\sin \theta \cos\phi)}{\partial \phi}=r\sin \theta \dfrac{\partial (\cos \phi)}{\partial \phi}=r\sin \theta (-\sin \phi)=-r\sin \theta \sin \phi \]
in the derivative with respect ϕ, the values of r and θ are constant and the term at
r and the sine are moved out of the derivative.
\( y=r\sin \theta \sin \phi \):
\( \dfrac{\partial y}{\partial r}=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial r}=\sin \theta \sin \phi\dfrac{\partial r}{\partial r}=\sin \theta \sin \phi \times 1=\sin \theta \sin \phi \),
\[ \dfrac{\partial y}{\partial r}=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial r}=\sin \theta \sin \phi\dfrac{\partial r}{\partial r}=\sin \theta \sin \phi \times 1=\sin \theta \sin \phi \]
in the derivative with respect to r, the values of θ and ϕ are constant, and the sine
terms are moved out of the derivative.
\( \dfrac{\partial y}{\partial \theta }=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial \theta}=r\sin \phi \dfrac{\partial(\sin \theta)}{\partial \theta}=r\cos \theta \sin \phi \),
\[ \dfrac{\partial y}{\partial \theta }=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial \theta}=r\sin \phi \dfrac{\partial(\sin \theta)}{\partial \theta}=r\cos \theta \sin \phi \]
in the derivative with respect to θ, the values of r and ϕ are constant, and the term
at r and the sine are moved out of the derivative.
\( \dfrac{\partial y}{\partial \phi}=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial \phi}=r\sin \theta \dfrac{\partial(\sin \phi)}{\partial \phi }=r\sin \theta \cos \phi \),
\[ \dfrac{\partial y}{\partial \phi}=\dfrac{\partial (r\sin \theta\sin \phi)}{\partial \phi}=r\sin \theta \dfrac{\partial(\sin \phi)}{\partial \phi }=r\sin \theta \cos \phi \]
in the derivative with respect to ϕ, the values of r e θ are constant, and the term at
r and the sine are moved out of the derivative.
\( z=r\cos \theta \):
\( \dfrac{\partial z}{\partial r}=\dfrac{\partial (r\cos \theta )}{\partial r}=\cos \theta \dfrac{\partial r}{\partial r}=\cos \theta \times 1=\cos \theta \),
\[ \dfrac{\partial z}{\partial r}=\dfrac{\partial (r\cos \theta )}{\partial r}=\cos \theta \dfrac{\partial r}{\partial r}=\cos \theta \times 1=\cos \theta \]
in the derivative with respect to r, the value of θ is constant, and the cosine is moved out
of the derivative.
\( \dfrac{\partial z}{\partial \theta}=\dfrac{\partial (r\cos \theta)}{\partial \theta}=r\dfrac{\partial (\cos \theta)}{\partial \theta}=r(-\sin \theta )=-r\sin \theta \),
\[ \dfrac{\partial z}{\partial \theta}=\dfrac{\partial (r\cos \theta)}{\partial \theta}=r\dfrac{\partial (\cos \theta)}{\partial \theta}=r(-\sin \theta )=-r\sin \theta \]
in the derivative with respect θ, the value of r is constant, and the term at r is
moved out of the derivative.
\( \dfrac{\partial z}{\partial \phi}=\dfrac{\partial (r\cos \theta)}{\partial \phi}=0 \), the function z does not depend on ϕ, in the derivative with respect ϕ the values of r e θ are constants, and the derivative of a constant is zero.
\[
dA=J\;d\theta \;d\phi
\]
Note: There is no derivative in dr because the Gaussian Surface has a constant
radius equal to r.
\[
J=\left|
\begin{matrix}
\;\sin \theta \cos \phi & r\cos \theta \cos\phi & -r\sin \theta \sin \phi \;\\
\;\sin \theta\sin \phi & r\cos \theta \sin \phi & r\sin \theta \cos\phi \;\\
\;\cos \theta &-r\sin \theta &0\;
\end{matrix}
\right|
\]
computing the determinant using the Rule of Sarrus
\[
\begin{gather}
J=(\sin \theta \cos \phi).(r\cos \theta\sin \phi).0+(r\cos \theta \cos \phi).(r\sin \theta \cos\phi).(\cos \theta)
\text{+} \qquad\qquad\qquad\quad\\
\text{+}(-r\sin \theta \sin \phi).(\sin \theta \sin \phi).(-r\sin \theta)-(-r\sin \theta \sin \phi).(r\cos \theta \sin \phi).(\cos \theta)
\text{--}\\
\text{--}
(\sin \theta \cos \phi).(r\sin \theta \cos \phi).(-r\sin \theta)-(r\cos \theta\cos \phi).(\sin \theta \sin \phi).0
\qquad\qquad\quad
\\{\,}\\
J=0+r^{2}\cos ^{2}\theta \sin \theta \cos ^{2}\phi+r^{2}\sin ^{3}\theta \sin ^{2}\phi +r^{2}\cos^{2}\theta\sin \theta \sin ^{2}\phi +r^{2}\sin ^{3}\theta \cos^{2}\phi -0
\\{\,}\\
J=r^{2}[\cos ^{2}\theta \sin \theta \cos ^{2}\phi+\sin ^{3}\theta \sin ^{2}\phi +\cos ^{2}\theta\sin \theta \sin ^{2}\phi +\sin ^{3}\theta \cos ^{2}\phi]
\\{\,}\\
J=r^{2}[\cos ^{2}\theta \sin \theta \underbrace{(\cos^{2}\phi +\sin ^{2}\phi)}_{1}+\sin ^{3}\theta\underbrace{(\cos ^{2}\phi +\sin ^{2}\phi)}_{1}]
\\{\,}\\
J=r^{2}[\cos ^{2}\theta \sin \theta+\sin ^{2}\theta \sin \theta ]
\\{\,}\\
J=r^{2}[\underbrace{(\cos^{2}\theta +\sin ^{2}\theta)}_{1}\sin \theta]
\\{\,}\\
J=r^{2}\sin \theta
\end{gather}
\]
\[
\begin{gather}
dA=r^{2}\sin \theta \;d\theta \;d\phi \tag{VI}
\end{gather}
\]
substituting expression (VI) into expression (IV)
\[
\begin{gather}
\int_{A}Er^{2}\sin \theta \;d\theta \;d\phi =\frac{q}{\epsilon_{0}} \tag{VII}
\end{gather}
\]
Since the electric field is uniform and the integral does not depend on the radius, they can be moved
out of the integral, and the integrals can be separated.
\[
Er^{2}\int \sin \theta \;d\theta \int d\phi =\frac{q}{\epsilon_{0}}
\]
The limits of integration will be from 0 to π in dθ, and from 0 and 2π in
dϕ in one complete turn around the base of the hemisphere, (Figure 3-B)
\[
Er^{2}\int_{0}^{\pi}\sin \theta \;d\theta \int_{0}^{{2\pi}}d\phi =\frac{q}{\epsilon_{0}}
\]

Integration of \( \displaystyle \int_{0}^{\pi}\sin \theta \;d\theta \)
\[
\begin{split}
\int_{0}^{\pi}\sin \theta \;d\theta &\Rightarrow \left.-\cos\theta \;\right|_{\;0}^{\;\pi }\Rightarrow -(\cos \pi -\cos0)\Rightarrow\\
&\Rightarrow -(-1-1)\Rightarrow -(-2)= 2
\end{split}
\]
Integration of \( \displaystyle \int_{0}^{2\pi}\;d\phi \)
\[
\int_{0}^{2\pi}\;d\phi \Rightarrow\left.\phi \;\right|_{\;0}^{\;2\pi}\Rightarrow2\pi-0=2\pi
\]
\[
Er^{2}\times 2\times 2\pi =\frac{q}{\epsilon_{0}}
\]
\[ \bbox[#FFCCCC,10px]
{E=\frac{q}{4\pi \epsilon_{0}r^{2}}}
\]
advertisement

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .