Solved Problem on Energy, Work and Power
advertisement
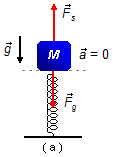
In the figure, the spring is ideal, situation (a) is the stable equilibrium of the spring-mass system,
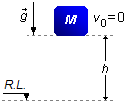
and situation (b) is that of the spring at rest. Releasing block M as indicated in the situation
(b), determine:
a) The spring constant;
b) The maximum speed reached by block M.
a) The spring constant;
b) The maximum speed reached by block M.

Problem data:
- Height of the fall of block M until it reaches the spring: h;
- Distance that the spring is compressed under the action of the block M: d.
a) To calculate the spring constant, we use the equilibrium situation shown in (a), Figure 1. The forces
acting on the block are:
- \( {\vec{F}}_{S} \): spring force due to spring;
- \( {\vec F}_{g} \): gravitational force on block M.
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sum F=0}
\end{gather}
\]
we choose a reference frame pointing in the downward direction and apply this condition to Figure 1
\[
\begin{gather}
F_{g}-F_{S}=0 \tag{I}
\end{gather}
\]
the gravitational force is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{F_{g}=mg} \tag{II}
\end{gather}
\]
the spring force is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{F_{S}=kx} \tag{III}
\end{gather}
\]
substituting expressions (II) and (III) into expression (I) and x=d
\[
\begin{gather}
mg-kx=0\\[5pt]
mg=kx
\end{gather}
\]
the spring constant will be
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{k=\frac{mg}{d}}
\end{gather}
\]
b) To calculate the maximum speed reached by the block, we divided the problem into two parts; first, the fall of block M until it reaches the spring, and second the compression of the spring until the equilibrium position.
In the first part, the block is in free fall, under the action of acceleration due to gravity, starting from rest. Under these conditions, using the Principle of Conservation of Mechanical Energy. Taking the Reference Level (R.L.) for this part of the movement on the spring platform. At the point where the block is released, we only have Potential Energy, \( U_{i} \), due to the height relative to the reference frame, and at the point where the block hits the spring, we only have Kinetic Energy, \( K_{f} \), due to velocity (Figure 2)
\[
\begin{gather}
E_{M}^{i}=E_{M}^{f}\\
U_{i}=K_{f} \tag{IV}
\end{gather}
\]
the Potential Energy is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{U=mgh} \tag{V}
\end{gather}
\]
the Kinetic Energy is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{K=\frac{mv^{2}}{2}} \tag{VI}
\end{gather}
\]
substituting expressions (V) and (VI) into expression (IV)
\[
\begin{gather}
\cancel{m}gh=\frac{\cancel{m}v^{2}}{2}\\[5pt]
gh=\frac{v^{2}}{2}\\[5pt]
v^{2}=2gh\\[5pt]
v=\sqrt{2gh\;} \tag{VII}
\end{gather}
\]
In the second part (Figure 3-a), we see that at the moment when the block hits the spring, the gravitational
force and the spring force, still small, are acting on the block, which increases with the compression of
the spring, at this point the acceleration of the block is positive (a>0) and the velocity is also
positive (v>0). As the block compresses the spring, the spring force increases until it equals the
gravitational force (Figure 3-b), at which point, as the two forces are equivalent, the acceleration equals
zero (stable equilibrium point given in the problem) and the velocity has reached its maximum value
(value requested in the problem).
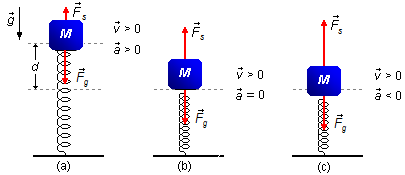
In Figure 3-c the block has passed the point of stable equilibrium, the spring force exceeds the value of the gravitational force and the resultant force is "up", the acceleration "changes sign" (a<0), but the speed continues "down" (v>0) it starts to decrease relative to the maximum value reached in the previous situation.
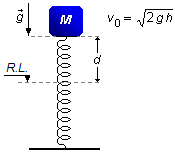
So the position where the velocity of the block is maximum is the equilibrium position, to calculate
its velocity at this point we will again use the Principle of Conservation of Mechanical Energy
(Figure 4). Assuming the reference level at the equilibrium height, we have that at the initial point
(where the block hits the spring) there is Potential Energy,
\( U_{i} \),
due to height d relative to the reference level, and Kinetic Energy,
\( K_{i} \),
due to the initial velocity v0 given by the value (VII) calculated above. At point
d, assumed as a reference, the Potential Energy is zero (there is no height), we have
Kinetic Energy,
\( K_{f} \),
due to the maximum velocity of the block, and Elastic Potential Energy,
\( U_{S} \),
due to the compression of the spring.
\[
\begin{gather}
E_{M}^{i}=E_{M}^{f}\\
K_{i}+U_{i}=K_{f}+U_{S}
\end{gather}
\]
the potential and kinetic energies are given by expressions (V) and (VI), respectively and the elastic potential energy is given by
\[
\begin{gather}
\bbox[#99CCFF,10px]
{U_{S}=\frac{kx^{2}}{2}} \tag{VIII}
\end{gather}
\]
substituting the expressions (V), (VI) and (VIII) for the initial and final situations, and using the value
of k calculated in item (a) and x=d
\[
\begin{gather}
\frac{mv_{0}^{2}}{2}+mgd=\frac{mv^{2}}{2}+\frac{kd^{2}}{2}\\[5pt]
\frac{1}{2}m\left(\sqrt{2gh}\right)^{2}+mgd=\frac{1}{2}mv^{2}+\frac{1}{2}\frac{mg}{d}d^{2}\\[5pt]
\frac{1}{2}mv^{2}=\frac{1}{2}m2gh+mgd-\frac{1}{2}mgd\\[5pt]
\cancel{\frac{1}{2}m}v^{2}=\cancel{\frac{1}{2}m}2gh+\cancel{\frac{1}{2}m}gd\\[5pt]
v^{2}=2gh+gd\\[5pt]
v^{2}=g(2h+d)
\end{gather}
\]
\[ \bbox[#FFCCCC,10px]
{v=\sqrt{g(2h+d)}}
\]
advertisement

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .