Exercício Resolvido de Função de Onda
publicidade
Dada a distribuição Gaussiana
\[
\begin{gather}
\rho(x)=A\operatorname{e}^{-\lambda(x-a)^{2}}
\end{gather}
\]
onde A, a e λ são constantes.a) Determine a constante A;
b) Determine \( \langle x\rangle \), \( \langle x^{2}\rangle \) e σ;
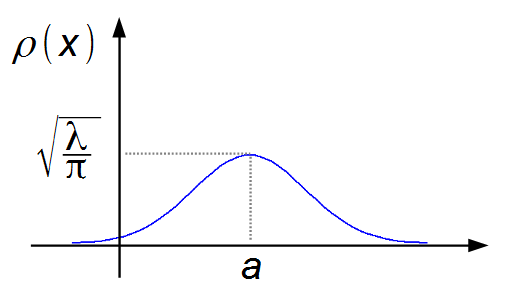
c) Esquematize o gráfico de ρ(x).
Solução
a) O valor da constante A é calculado pela integral da normalização da função ρ(x)
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\int_{-\infty}^{\infty}\rho(x)\;dx=1}
\end{gather}
\]
\[
\begin{gather}
\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda(x-a)^{2}}\;dx=1 \tag{I}
\end{gather}
\]
Integral de
\( \displaystyle \int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda (x-a)^{2}}\;dx \)
Elevando ao quadrado a integral
\( \displaystyle x=r\cos \theta +a \)
\( \displaystyle \frac{\partial x}{\partial r}=\frac{\partial (r\cos \theta +a)}{\partial r}=\cos \theta \frac{\partial r}{\partial r}+\frac{\partial a}{\partial r}=\cos \theta .1+0=\cos \theta \)
\( \displaystyle \frac{\partial x}{\partial \theta}=\frac{\partial (r\cos \theta+a)}{\partial \theta}=r\;\frac{\partial (\cos \theta )}{\partial\theta}+\frac{\partial a}{\partial \theta}=r(-\operatorname{sen}\theta )+0=-r\operatorname{sen}\theta \)
\( \displaystyle y=r\operatorname{sen}\theta +a \)
\( \displaystyle \frac{\partial y}{\partial r}=\frac{\partial(r\operatorname{sen}\theta+a)}{\partial r}=\operatorname{sen}\theta \;\frac{\partial r}{\partial r}+\frac{\partial a}{\partial r}=\operatorname{sen}\theta.1+0=\operatorname{sen}\theta \)
\( \displaystyle \frac{\partial y}{\partial \theta}=\frac{\partial(r\operatorname{sen}\theta +a)}{\partial \theta}=r\;\frac{\partial(\operatorname{sen}\theta )}{\partial \theta}+\frac{\partial a}{\partial \theta}=r\cos \theta +0=r\cos \theta \)
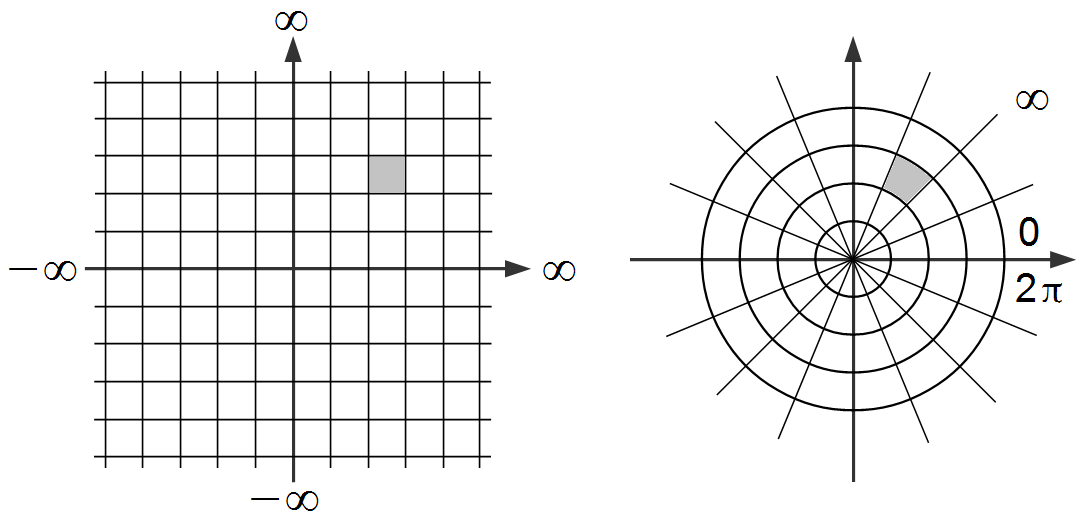 Figura 1
Figura 1
Fazendo a mudança de variável
para r = 0
temos u = −λ.02 = 0
para r = ∞
temos u = −λ.∞2 = ∞
Elevando ao quadrado a integral
\[
\begin{gather}
I^{2}=\left(\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda (x-a)^{2}}\;dx\right)^{2}\\[5pt]
I^{2}=\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda(x-a)^{2}}\;dx\;\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda (x-a)^{2}}\;dx
\end{gather}
\]
fazendo uma mudança na segunda variável, x = y
\[
\begin{gather}
I^{2}=\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda (x-a)^{2}}\;dx\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda (y-a)^{2}}\;dy\\[5pt]
I^{2}=\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda(x-a)^{2}}A\operatorname{e}^{-\lambda(y-a)^{2}}\;dx\;dy\\[5pt]
I^{2}=A^{2}\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}\operatorname{e}^{-\lambda[(x-a)^{2}+(y-a)^{2}]}\;dx\;dy \tag{II}
\end{gather}
\]
fazendo as mudanças de variáveis de coordenadas Cartesianas para coordenadas polares
\[
\begin{gather}
\left\{
\begin{matrix}
x-a=r\cos \theta \\[5pt]
y-a=r\operatorname{sen}\theta
\end{matrix}
\right. \tag{III}
\end{gather}
\]
O elemento de área em coordenadas Cartesianas é
\[
\begin{gather}
dA=dx\;dy
\end{gather}
\]
para obter o elemento de área em coordenadas polares calculamos o Jacobiano dado pelo determinante
\[
\begin{gather}
J=\left|
\begin{matrix}
\;\dfrac{\partial x}{\partial r}&\dfrac{\partial x}{\partial \theta}\;\\[5pt]
\;\dfrac{\partial y}{\partial r}&\dfrac{\partial y}{\partial \theta}\;
\end{matrix}
\right|
\end{gather}
\]
cálculo das derivadas parciais das funções x e y dadas em (III)
\( \displaystyle x=r\cos \theta +a \)
\( \displaystyle \frac{\partial x}{\partial r}=\frac{\partial (r\cos \theta +a)}{\partial r}=\cos \theta \frac{\partial r}{\partial r}+\frac{\partial a}{\partial r}=\cos \theta .1+0=\cos \theta \)
\[ \displaystyle \frac{\partial x}{\partial r}=\frac{\partial (r\cos \theta +a)}{\partial r}=\cos \theta \frac{\partial r}{\partial r}+\frac{\partial a}{\partial r}=\cos \theta .1+0=\cos \theta \]
\( \displaystyle \frac{\partial x}{\partial \theta}=\frac{\partial (r\cos \theta+a)}{\partial \theta}=r\;\frac{\partial (\cos \theta )}{\partial\theta}+\frac{\partial a}{\partial \theta}=r(-\operatorname{sen}\theta )+0=-r\operatorname{sen}\theta \)
\[ \displaystyle \frac{\partial x}{\partial \theta}=\frac{\partial (r\cos \theta+a)}{\partial \theta}=r\;\frac{\partial (\cos \theta )}{\partial\theta}+\frac{\partial a}{\partial \theta}=r(-\operatorname{sen}\theta )+0=-r\operatorname{sen}\theta \]
\( \displaystyle y=r\operatorname{sen}\theta +a \)
\( \displaystyle \frac{\partial y}{\partial r}=\frac{\partial(r\operatorname{sen}\theta+a)}{\partial r}=\operatorname{sen}\theta \;\frac{\partial r}{\partial r}+\frac{\partial a}{\partial r}=\operatorname{sen}\theta.1+0=\operatorname{sen}\theta \)
\[ \displaystyle \frac{\partial y}{\partial r}=\frac{\partial(r\operatorname{sen}\theta+a)}{\partial r}=\operatorname{sen}\theta \;\frac{\partial r}{\partial r}+\frac{\partial a}{\partial r}=\operatorname{sen}\theta.1+0=\operatorname{sen}\theta \]
\( \displaystyle \frac{\partial y}{\partial \theta}=\frac{\partial(r\operatorname{sen}\theta +a)}{\partial \theta}=r\;\frac{\partial(\operatorname{sen}\theta )}{\partial \theta}+\frac{\partial a}{\partial \theta}=r\cos \theta +0=r\cos \theta \)
\[ \displaystyle \frac{\partial y}{\partial \theta}=\frac{\partial(r\operatorname{sen}\theta +a)}{\partial \theta}=r\;\frac{\partial(\operatorname{sen}\theta )}{\partial \theta}+\frac{\partial a}{\partial \theta}=r\cos \theta +0=r\cos \theta \]
\[
\begin{gather}
dA=dx\;dy=J\;dr\;d\theta
\end{gather}
\]
\[
\begin{gather}
J=\left|
\begin{matrix}
\;\cos \theta&-r\operatorname{sen}\theta \;\\[5pt]
\;\operatorname{sen}\theta &r\cos\theta \end{matrix}\right|\\[5pt]
J=\cos \theta .r\cos \theta-(-r\operatorname{sen}\theta .\operatorname{sen}\theta )\\[5pt]
J=r\cos^{2}\theta +r\operatorname{sen}^{2}\theta \\[5pt]
J=r(\underbrace{\cos^{2}\theta +\operatorname{sen}^{2}\theta}_{1})\\[5pt]
J=r
\end{gather}
\]
\[
\begin{gather}
dA=r\;dr\;d\theta
\end{gather}
\]
Em coordenadas Cartesianas os extremos de integração são −∞ e +∞ em dx e
dy para cobrir todo o plano (Figura 1), em coordenadas polares para cobrir todo o plano os
extremos são 0 e +∞ em dr e 0 e 2π em dθ.
\[
\begin{align}
\int_{-\infty}^{\infty}\int_{-\infty}^{\infty} & \operatorname{e}^{-\lambda[(x-a)^{2}+(y-a)^{2}]}\;dx\;dy\Rightarrow \int_{{0}}^{\infty}\int_{{0}}^{{2\pi}}\operatorname{e}^{-\lambda [(r\cos \theta)^{2}+(r\operatorname{sen}\theta)^{2}]}r\;dr\;d\theta \Rightarrow\\[5pt]
& \Rightarrow \int_{{0}}^{\infty}\int_{{0}}^{{2\pi}}\operatorname{e}^{-\lambda r^{2}[\underbrace{\cos ^{2}\theta +\operatorname{sen}^{\;2}\theta}_{1}]}r\;dr\;d\theta \Rightarrow \\[5pt]
& \Rightarrow \int_{{0}}^{\infty}\int_{{0}}^{{2\pi}}\operatorname{e}^{-\lambda r^{2}}r\;dr\;d\theta \Rightarrow \\[5pt]
& \Rightarrow \int_{{0}}^{\infty}r\operatorname{e}^{-\lambda r^{2}}\;dr\underbrace{\int_{{0}}^{{2\pi}}d\theta}_{2\pi} \tag{IV}
\end{align}
\]
Integral de
\( \displaystyle \int_{{0}}^{\infty}r\operatorname{e}^{-\lambda r^{2}}\;dr \)
Fazendo a mudança de variável
\[
\begin{array}{l}
u=-\lambda r^{2}\\[5pt]
du=-2\lambda r\;dr\Rightarrow d r=-{\dfrac{du}{2\lambda r}}
\end{array}
\]
fazendo a mudança dos extremos de integração
para r = 0
temos u = −λ.02 = 0
para r = ∞
temos u = −λ.∞2 = ∞
\[
\begin{align}
\int_{{0}}^{\infty}r\operatorname{e}^{-\lambda r^{2}}\;dr & \Rightarrow \int_{{0}}^{-\infty}r\operatorname{e}^{u}\left(-{\frac{du}{2\lambda r}}\right)\Rightarrow-\frac{1}{2\lambda}\int_{{0}}^{-\infty}\operatorname{e}^{u}\;du\Rightarrow \\[5pt]
& \Rightarrow -\frac{1}{2\lambda}\left(\left.\operatorname{e}^{u}\right|_{\;0}^{\;-\infty}\right)\Rightarrow -\frac{1}{2\lambda}\left(\operatorname{e}^{-\infty}-\operatorname{e}^{0}\right)\Rightarrow\\[5pt]
& \Rightarrow -\frac{1}{2\lambda}\left(\frac{1}{\operatorname{e}^{\infty}}-1\right)\Rightarrow-\frac{1}{2\lambda}\left(\frac{1}{\infty}-1\right)\Rightarrow \\[5pt]
& \Rightarrow -\frac{1}{2\lambda}\left(0-1\right)\Rightarrow \frac{1}{2\lambda}
\end{align}
\]
substituindo na expressão (IV)
\[
\begin{gather}
\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}\operatorname{e}^{-\lambda[(x-a)^{2}+(y-a)^{2}]}\;dx\;dy=\frac{1}{2\lambda}.2\pi =\frac{\pi}{\lambda}
\end{gather}
\]
Usando as equações (I) e (II) e substituindo o resultado acima
\[
\begin{gather}
I^{2}=A^{2}\frac{\pi}{\lambda}=1\\[5pt]
A^{2}=\frac{\lambda}{\pi}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{A=\sqrt{\frac{\lambda}{\pi}}}
\end{gather}
\]
b) O valor esperado de x é calculado pela integral
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\langle x\rangle =\int_{-\infty}^{\infty}x\rho(x)\;dx}
\end{gather}
\]
\[
\begin{gather}
\langle x\rangle =\int_{-\infty}^{\infty}xA\operatorname{e}^{-\lambda (x-a)^{2}}\;dx\\[5pt]
\langle x\rangle =A\int_{-\infty}^{\infty}x\operatorname{e}^{-\lambda(x-a)^{2}}\;dx \tag{V}
\end{gather}
\]
Integral de
\( \displaystyle \int_{-\infty}^{\infty}x\operatorname{e}^{-\lambda (x-a)^{2}}\;dx \)
Fazendo a mudança de variável
para x = −∞
temos u = −∞−a = −∞
para x = ∞
temos u = ∞−a = ∞
1.º método
A função \( f(u)=u \) é uma função ímpar e a função \( g(u)=\operatorname{e}^{-\lambda u^{2}} \) é uma função par, uma função ímpar multiplicada por uma função par é igual a uma função ímpar, que integrada num intervalo simétrico (de −∞ a ∞) é igual a zero.
Integral de \( \displaystyle \int_{-\infty}^{\infty}\operatorname{e}^{-\lambda u^{2}}\;du \)
A integral \( I=\int_{-\infty}^{\infty}\operatorname{e}^{-\lambda u^{2}}\;du \), é do mesmo tipo da integral resolvida no item (a) \( I=\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda(x-a)^{2}}\;dx \) assim seu resultado é o mesmo
Fazendo a mudança de variável
\[
\begin{array}[l]
u=x-a\Rightarrow x=u+a\\[5pt]
du=dr
\end{array}
\]
fazendo a mudança dos extremos de integração
para x = −∞
temos u = −∞−a = −∞
para x = ∞
temos u = ∞−a = ∞
\[
\begin{align}
\int_{-\infty}^{\infty} & x\operatorname{e}^{-\lambda (x-a)^{2}}\;dx\Rightarrow \int_{-\infty}^{\infty}(u+a)\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow\\[5pt]
& \Rightarrow \int_{-\infty}^{\infty}u\operatorname{e}^{-\lambda u^{2}}\;du+\int_{-\infty}^{\infty}a\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow\\[5pt]
& \Rightarrow \int_{-\infty}^{\infty}u\operatorname{e}^{-\lambda u^{2}}\;du+a\int_{-\infty}^{\infty}\operatorname{e}^{-\lambda u^{2}}\;du \tag{VI}
\end{align}
\]
Integral de
\( \displaystyle \int_{-\infty}^{\infty}u\;\operatorname{e}^{-\lambda \;u^{\;2}}\;du \)
1.º método
\[
\begin{align}
\int_{-\infty}^{\infty}u\operatorname{e}^{-\lambda u^{2}}\;du & \Rightarrow \left.-{\frac{1}{2\lambda}}\operatorname{e}^{-\lambda u^{2}}\;\right|_{\;-\infty}^{\;\infty}\Rightarrow -\frac{1}{2\lambda}\left(\operatorname{e}^{-\lambda (\infty)^{2}}-\operatorname{e}^{-\lambda (-\infty)^{2}}\right)\Rightarrow\\[5pt]
& \Rightarrow -\frac{1}{2\lambda}\left(\operatorname{e}^{-\infty}-\operatorname{e}^{-\infty}\right)\Rightarrow -\frac{1}{2\lambda}\left(\frac{1}{\operatorname{e}^{\infty}}-\frac{1}{\operatorname{e}^{\infty}}\right)\Rightarrow\\[5pt]
& \Rightarrow -\frac{1}{2\lambda}\left(\frac{1}{\infty}-\frac{1}{\infty}\right)\Rightarrow -\frac{1}{2\lambda}\left(0-0\right)\Rightarrow 0
\end{align}
\]
2.º método
A função \( f(u)=u \) é uma função ímpar e a função \( g(u)=\operatorname{e}^{-\lambda u^{2}} \) é uma função par, uma função ímpar multiplicada por uma função par é igual a uma função ímpar, que integrada num intervalo simétrico (de −∞ a ∞) é igual a zero.
Integral de \( \displaystyle \int_{-\infty}^{\infty}\operatorname{e}^{-\lambda u^{2}}\;du \)
A integral \( I=\int_{-\infty}^{\infty}\operatorname{e}^{-\lambda u^{2}}\;du \), é do mesmo tipo da integral resolvida no item (a) \( I=\int_{-\infty}^{\infty}A\operatorname{e}^{-\lambda(x-a)^{2}}\;dx \) assim seu resultado é o mesmo
\[
\begin{gather}
I^{2}=\frac{\pi}{\lambda}\\[5pt]
I=\sqrt{\frac{\pi}{\lambda}\;}
\end{gather}
\]
Observação: A diferença entre as duas funções é que a função ρ(x) está
centrada em um ponto a sobre o eixo das abscissas, (x−a) no expoente, e a
função no integrando acima esta centrada na origem, (u−0). Substituindo os resultados acima
na expressão (VI)
\[
\begin{gather}
\int_{-\infty}^{\infty}x\operatorname{e}^{-\lambda(x-a)^{2}}\;dx=0+a\;\sqrt{\frac{\pi}{\lambda}\;}=a\;\sqrt{\frac{\pi}{\lambda}\;}
\end{gather}
\]
Substituindo a constante A determinada no item (a) e o valor da integral calculada acima, na equação (V)
\[
\begin{gather}
\langle x\rangle =\cancel{\sqrt{\frac{\lambda}{\pi}\;}}a\cancel{\;\sqrt{\frac{\pi}{\lambda}\;}}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\langle x\rangle =a}
\end{gather}
\]
O valor esperado de x2 é calculado pela integral
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\langle x^{2}\rangle =\int_{-\infty}^{\infty}x^{\;2}\rho(x)\;dx}
\end{gather}
\]
\[
\begin{gather}
\langle x^{2}\rangle =\int_{-\infty}^{\infty}x^{2}A\operatorname{e}^{-\lambda (x-a)^{2}}\;dx\\[5pt]
\langle x^{\;2}\rangle =A\int_{-\infty}^{\infty}x^{\;2}\operatorname{e}^{-\lambda (x-a)^{2}}\;dx \tag{VII}
\end{gather}
\]
Integral de
\( \displaystyle \int_{-\infty}^{\infty}x^{2}\operatorname{e}^{-\lambda(x-a)^{2}}\;dx \)
Fazendo a mudança de variável
para x = −∞
temos u = −∞−a = −∞
para x = ∞
temos u = ∞−a = ∞
Usando Integração por Partes \( \int fg'=fg-\int f'g \)
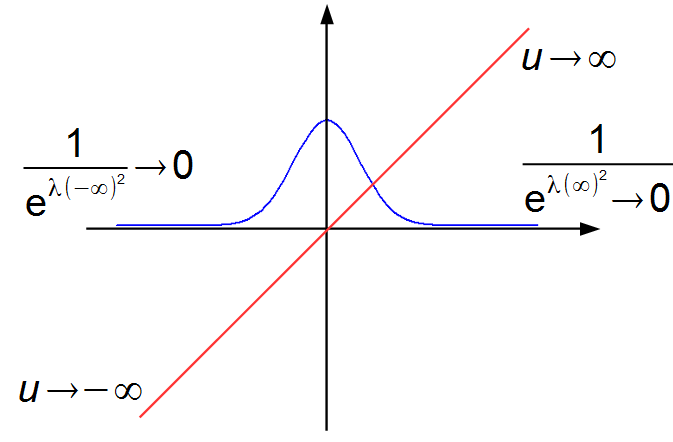 Figura 2
substituindo a expressão (IX) na expressão (VIII)
Figura 2
substituindo a expressão (IX) na expressão (VIII)
Fazendo a mudança de variável
\[
\begin{array}{l}
u=x-a\Rightarrow x=u+a\\[5pt]
du=dr
\end{array}
\]
fazendo a mudança dos limites de integração
para x = −∞
temos u = −∞−a = −∞
para x = ∞
temos u = ∞−a = ∞
\[
\begin{align}
\int_{-\infty}^{\infty} & x^{\;2}\operatorname{e}^{-\lambda (x-a)^{2}}\;dx\Rightarrow \int_{-\infty}^{\infty}(u+a)^{2}\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow\\[5pt]
& \Rightarrow \int_{-\infty}^{\infty}(u^{2}+2ua+a^{2})\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow\\[5pt]
& \Rightarrow \int_{-\infty}^{\infty}u^{2}\operatorname{e}^{-\lambda u^{2}}+2ua\operatorname{e}^{-\lambda u^{2}}+a^{2}\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow \hfill\\[5pt]
& \Rightarrow \int_{-\infty}^{\infty}u^{2}\operatorname{e}^{-\lambda u^{2}}\;du+\int_{-\infty}^{\infty}2ua\operatorname{e}^{-\lambda u^{2}}\;du+\int_{-\infty}^{\infty}a^{2}\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow\\[5pt]
& \Rightarrow \int_{-\infty}^{\infty}u^{2}\operatorname{e}^{-\lambda u^{2}}\;du+2a\underbrace{\int_{-\infty}^{\infty}u\operatorname{e}^{-\lambda u^{2}}\;du}_{0}+a^{2}\underbrace{\int_{-\infty}^{\infty}\operatorname{e}^{-\lambda u^{2}}\;du}_{\sqrt{\frac{\pi}{\lambda}}} \tag{VIII}
\end{align}
\]
Integral de
\( \displaystyle \int_{-\infty}^{\infty}u^{2}\operatorname{e}^{-\lambda u^{2}}\;du=\int_{-\infty}^{\infty}u.u\operatorname{e}^{-\lambda u^{2}}\;du \)
\[ \displaystyle \int_{-\infty}^{\infty}u^{2}\operatorname{e}^{-\lambda u^{2}}\;du=\int_{-\infty}^{\infty}u.u\operatorname{e}^{-\lambda u^{2}}\;du \]
Usando Integração por Partes \( \int fg'=fg-\int f'g \)
\[
\begin{gather}
\begin{array}{l}
f=u & \qquad g'=u\operatorname{e}^{-\lambda u^{2}}\\[5pt]
\begin{array}{l}
f'=1\\[5pt]
\phantom{{\frac{\phantom{{}}}{\phantom{{}}}}}\\[5pt]
\phantom{{\frac{\phantom{{}}}{\phantom{{}}}}}\\[5pt]
\phantom{{\frac{\phantom{{}}}{\phantom{{}}}}}
\end{array}
& \qquad
\begin{array}{l}
g=\int u\operatorname{e}^{-\lambda u^{2}}\;du=\int \operatorname{e}^{-\lambda u^{2}}u\;du\\[5pt]
k=-\lambda u^{2}\Rightarrow\dfrac{dk}{du}=-2\lambda u\Rightarrow u du=-{\dfrac{dk}{2\lambda}}\\[5pt]
g=-\int \operatorname{e}^{u}\;\dfrac{du}{2\lambda}=\dfrac{\operatorname{e}^{u}}{2\lambda}=\dfrac{\operatorname{e}^{-x^{2}}}{2\lambda}
\end{array}
\end{array}
\end{gather}
\]
\[
\begin{align}
\int_{-\infty}^{\infty} & u^{2}\operatorname{e}^{-\lambda u^{2}}\;du\Rightarrow\left.u\frac{\operatorname{e}^{-\lambda u^{2}}}{2\lambda}\;\right|_{\;-\infty}^{\;\infty}+\int_{-\infty}^{\infty}1.\frac{\operatorname{e}^{-\lambda u^{2}}}{2\lambda}\;du\Rightarrow\\[5pt]
& \Rightarrow\left.u\frac{\operatorname{e}^{-\lambda u^{2}}}{2\lambda}\;\right|_{\;-\infty}^{\;\infty}+\int_{-\infty}^{\infty}1.\frac{\operatorname{e}^{-\lambda u^{2}}}{2\lambda}\;du\Rightarrow\\[5pt]
& \Rightarrow\frac{1}{2\lambda}\left(\frac{\infty}{\operatorname{e}^{\lambda(\infty)^{2}}}-\frac{-\infty}{\operatorname{e}^{\lambda (-\infty)^{2}}}\right)+\frac{1}{2\lambda}\underbrace{\int_{-\infty}^{\infty}{\operatorname{e}^{-\lambda u^{2}}\;du}}_{\sqrt{\frac{\pi}{\lambda}}}\Rightarrow \frac{1}{2\lambda}\sqrt{\frac{\pi}{\lambda}} \tag{IX}
\end{align}
\]
Observação: Nos termos entre parênteses
\( u=\pm \infty \)
tende à
\( \pm \infty \),
\( \operatorname{e}^{\lambda (\pm \infty )^{2}} \)
tende à
\( +\infty \),
mas a fração
\( \frac{1}{\operatorname{e}^{\lambda (\pm \infty )^{2}}} \)
tende à zero (Figura 2). Como a fração tende à zero mais rapidamente do que u tende ao infinito, os
termos
\( \frac{\pm \infty}{\operatorname{e}^{\lambda (\pm \infty )^{2}}} \)
tendem à zero.
\[
\begin{gather}
\int_{-\infty}^{\infty}x^{\;2}\operatorname{e}^{-\lambda(x-a)^{2}}\;dx\Rightarrow \frac{1}{2\lambda}\sqrt{\frac{\pi}{\lambda}}+a^{2}\sqrt{\frac{\pi}{\lambda}}\Rightarrow \left(\frac{1}{2\lambda}+a^{2}\right)\sqrt{\frac{\pi}{\lambda}}
\end{gather}
\]
Substituindo a constante A determinada no item (a) e o valor da integral calculada acima, na equação (VII)
\[
\begin{gather}
\langle x^{\;2}\rangle =\cancel{\sqrt{\frac{\lambda}{\pi}}}\;\left(\frac{1}{2\lambda}+a^{2}\right)\cancel{\sqrt{\frac{\pi}{\lambda}}}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\langle x^{2}\rangle =\frac{1}{2\lambda}+a^{2}}
\end{gather}
\]
O valor da variância σ2 é dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\sigma^{2}=\langle x^{2}\rangle -\langle x \rangle ^{2}}
\end{gather}
\]
substituindo os valores de
\( \langle x\rangle \)
e
\( \langle x^{2}\rangle \)
encontrados acima
\[
\begin{gather}
\sigma^{2}=\frac{1}{2\lambda}+a^{2}-a^{2}\\[5pt]
\sigma^{2}=\frac{1}{2\lambda}
\end{gather}
\]
o valor do desvio padrão σ é
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{\sigma=\frac{1}{\sqrt{2\lambda}\;}}
\end{gather}
\]
c) Esquema do gráfico (Figura 3)
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .