Exercício Resolvido de Equação de Lagrange
publicidade
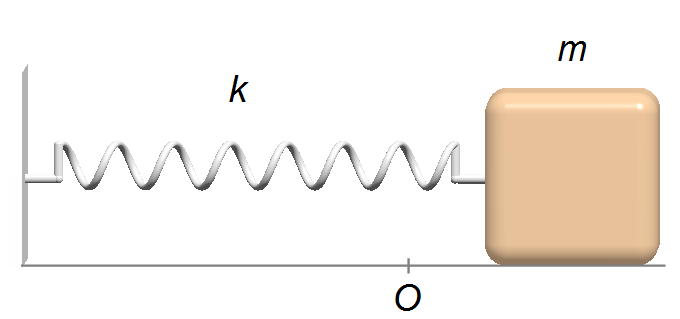
Um corpo, de massa m, está preso a extremidade de uma mola, de constante elástica k, e
apoiado sobre uma superfície horizontal sem atrito. A outra extremidade da mola se encontra presa em
ponto fixo. Afasta-se o corpo da posição de equilíbrio e libera-se o corpo. Determine a equação de
movimento do corpo.
Dados do problema:
- Massa do corpo: m;
- Constante elástica da mola: k.
A Lagrangiana de um sistema é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{L=T-V} \tag{I}
\end{gather}
\]
A energia cinética é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{T=\frac{1}{2}mv^{2}}
\end{gather}
\]
\[
\begin{gather}
T=\frac{1}{2}m{\dot{x}}^{2} \tag{II}
\end{gather}
\]
A energia potencial elástica é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{U=\frac{1}{2}kx^{2}} \tag{III}
\end{gather}
\]
Substituindo as expressões (II) e (III) na expressão (I)
\[
\begin{gather}
L=\frac{1}{2}m{\dot{x}}^{2}-\frac{1}{2}kx^{2}
\end{gather}
\]
A Equação de Lagrange é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\frac{d}{dt}\left(\frac{\partial L}{\partial{\dot{q}}_{j}}\right)-\frac{\partial L}{\partial q_{j}}=0} \tag{IV}
\end{gather}
\]
temos uma variável, j = 1, fazendo
\( q_{1}=x \)
e
\( \dot{q}_{1}=\dot{x} \).
\[
\begin{gather}
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{x}}\right)-\frac{\partial L}{\partial x}=0 \tag{V}
\end{gather}
\]
- Derivada de \( \displaystyle \frac{\partial L}{\partial x} \)
\[
\begin{gather}
\frac{\partial L}{\partial x}=\frac{\partial }{\partial x}\left[\frac{1}{2}m{\dot{x}}^{2}-\frac{1}{2}kx^{2}\right]\\[5pt]
\frac{\partial L}{\partial x}=\underbrace{\frac{\partial }{\partial x}\left[\frac{1}{2}m{\dot{x}}^{2}\right]}_{0}-\frac{\partial }{\partial x}\left[\frac{1}{2}kx^{2}\right]\\[5pt]
\frac{\partial L}{\partial x}=-{\frac{2}{2}kx}\\[5pt]
\frac{\partial L}{\partial x}=-kx \tag{VI}
\end{gather}
\]
no primeiro termo não aparece a variável x, o primeiro termo depende de
\( \dot{x} \).
- Derivada de \( \displaystyle \frac{\partial L}{\partial \dot{x}} \)
\[
\begin{gather}
\frac{\partial L}{\partial \dot{x}}=\frac{\partial}{\partial\dot{x}}\left[\frac{1}{2}m{\dot{x}}^{2}-\frac{1}{2}kx^{2}\right]\\[5pt]
\frac{\partial L}{\partial \dot{x}}=\frac{\partial }{\partial\dot{x}}\left[\frac{1}{2}m{\dot{x}}^{2}\right]-\underbrace{\frac{\partial}{\partial \dot{x}}\left[\frac{1}{2}kx^{2}\right]}_{0}\\[5pt]
\frac{\partial L}{\partial \dot{x}}=\frac{2}{2}m\dot{x}\\[5pt]
\frac{\partial L}{\partial\dot{x}}=m\dot{x} \tag{VII}
\end{gather}
\]
no segundo termo não aparece a variável
\( \dot{x} \),
o segundo termo depende de x.
- Derivada de \( \displaystyle \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{x}}\right) \)
\[
\begin{gather}
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{x}}\right)=\frac{d}{dt}\left(m\dot{x}\right)\\[5pt]
\frac{d}{dt}\left(\frac{\partial L}{\partial \dot{z}}\right)=m\ddot{x} \tag{VIII}
\end{gather}
\]
Substituindo as expressões (VI) e (VIII) na expressão (V)
\[
\begin{gather}
m\ddot{x}-\left(-kx\right)=0\\[5pt]
m\ddot{x}+kx=0
\end{gather}
\]
dividindo toda a equação pela massa m
\[
\begin{gather}
\ddot{x}+\frac{k}{m}x=0
\end{gather}
\]
fazendo a definição
\( \omega_{0}^{2}\equiv \frac{k}{m} \)
\[
\begin{gather}
\ddot{x}+\omega_{0}^{2}x=0
\end{gather}
\]
Solução de \( \ddot{x}+\omega_{0}^{2}x=0 \)
A solução deste tipo de equação é encontrada fazendo-se as substituições
A solução da equação diferencial será
A solução deste tipo de equação é encontrada fazendo-se as substituições
\[
\begin{array}{l}
x=\operatorname{e}^{\lambda t}\\[10pt]
\dot{x}=\lambda\operatorname{e}^{\lambda t}\\[10pt]
\ddot{x}=\lambda^{2}\operatorname{e}^{\lambda t}
\end{array}
\]
substituindo estes valores na equação diferencial
\[
\begin{gather}
\lambda^{2}\operatorname{e}^{\lambda t}+\omega_{0}^{2}\operatorname{e}^{\lambda t}=0\\[5pt]
\operatorname{e}^{\lambda t}\left(\lambda^{2}+\omega_{0}^{2}\right)=0\\[5pt]
\lambda^{2}+\omega_{0}^{2}=\frac{0}{\operatorname{e}^{\lambda t}}\\[5pt]
\lambda^{2}+\omega_{0}^{2}=0\\[5pt]
\end{gather}
\]
esta é a Equação Característica que tem como solução
\[
\begin{gather}
\lambda^{2}=-\omega_{0}^{2}\\[5pt]
\lambda =\sqrt{-\omega_{0}^{2}}\\[5pt]
\lambda_{1,2}=\pm \omega_{0}\mathrm{i}
\end{gather}
\]
onde
\( \mathrm{i}=\sqrt{-1} \).A solução da equação diferencial será
\[
\begin{gather}
x=C_{1}\operatorname{e}^{\lambda_{1}t}+C_{2}\operatorname{e}^{\lambda_{2}t}\\[5pt]
x=C_{1}\operatorname{e}^{\omega_{0}\text{i}t}+C_{2}\operatorname{e}^{-\omega_{0}\mathrm{i}t}
\end{gather}
\]
onde C1 e C2 são constantes de integração, usando a
Fórmula de Euler
\( \operatorname{e}^{i\theta }=\cos \theta+\text{i}\operatorname{sen}\theta \)
\[
\begin{gather}
x=C_{1}\left(\cos \omega_{0}t+\mathrm{i}\operatorname{sen}\omega_{0}t\right)+C_{2}\left(\cos\omega_{0}t-\mathrm{i}\operatorname{sen}\omega_{0}t\right)\\[5pt]
x=C_{1}\cos\omega_{0}t+\mathrm{i}C_{1}\operatorname{sen}\omega_{0}t+C_{2}\cos\omega_{0}t-\mathrm{i}C_{2}\operatorname{sen}\omega_{0}t\\[5pt]
x=\left(C_{1}+C_{2}\right)\cos \omega_{0}t+\mathrm{i}\left(C_{1}-C_{2}\right)\operatorname{sen}\omega_{0}t
\end{gather}
\]
definindo duas novas constantes α e β em termos de C1 e
C2
\[
\begin{gather}
\alpha \equiv C_{1}+C_{2}\\[5pt]
\text{e}\\[5pt]
\beta \equiv \mathrm{i}(C_{1}-C_{2})
\end{gather}
\]
\[
\begin{gather}
x=\alpha \cos \omega_{0}t+\beta \operatorname{sen}\omega_{0}t
\end{gather}
\]
multiplicando e dividindo esta expressão por
\( \sqrt{\alpha^{2}+\beta^{2}} \)
\[
\begin{gather}
x=\left(\alpha \cos \omega_{0}t+\beta\operatorname{sen}\omega_{0}t\right)\frac{\sqrt{\alpha^{2}+\beta^{2}\;}}{\sqrt{\alpha^{2}+\beta^{2}\;}}\\[5pt]
x=\sqrt{\alpha^{2}+\beta^{2}\;}\left(\frac{\alpha }{\sqrt{\alpha^{2}+\beta^{2}}}\cos \omega_{0}t+\frac{\beta }{\sqrt{\alpha^{2}+\beta^{2}\;}}\operatorname{sen}\omega_{0}t\right)
\end{gather}
\]
fazendo as seguintes definições
\[
\begin{gather}
A\equiv \sqrt{\alpha^{2}+\beta{2}\;}\\[10pt]
\cos\varphi \equiv \frac{\alpha }{\sqrt{\alpha^{2}+\beta^{2}\;}}\\[10pt]
\operatorname{sen}\varphi \equiv \frac{\beta }{\sqrt{\alpha^{2}+\beta^{2}\;}}
\end{gather}
\]
\[
\begin{gather}
x=A(\cos \varphi \cos \omega_{0}t+\operatorname{sen}\varphi\operatorname{sen}\omega_{0}t)
\end{gather}
\]
Lembrando da identidade trigonométrica
\( \cos(a-b)=\cos a\cos b+\operatorname{sen}a\operatorname{sen}b \)
\[ \cos(a-b)=\cos a\cos b+\operatorname{sen}a\operatorname{sen}b \]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{x=A\cos (\omega_{0}t-\varphi )}
\end{gather}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .