Ejercicio Resuelto sobre Movimiento Bidimensional
publicidad
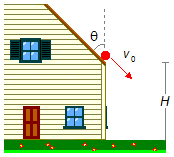
Una pelota rueda sobre el techo de una casa hasta caer por el borde con velocidad inicial
v0. La altura desde donde cae la pelota es igual a H y el ángulo de inclinación
del techo con la vertical es igual a θ. Calcula:
a) El tiempo necesario para que la pelota alcance el suelo;
b) La distancia horizontal desde la casa donde la pelota golpea el suelo;
c) La ecuación de la trayectoria del movimiento;
d) La velocidad con la que la pelota golpea el suelo.
a) El tiempo necesario para que la pelota alcance el suelo;
b) La distancia horizontal desde la casa donde la pelota golpea el suelo;
c) La ecuación de la trayectoria del movimiento;
d) La velocidad con la que la pelota golpea el suelo.
Datos del problema:
- Velocidad inicial de la pelota: v0;
- Altura desde el borde del techo: H;
- Ángulo de inclinación del techo: θ.
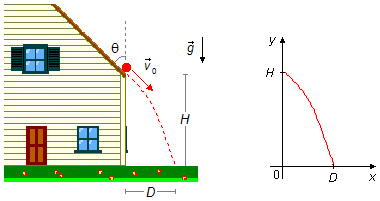
Tomamos un sistema de referencia con origen en el suelo con el eje Ox apuntando hacia la derecha y Oy hacia arriba, la aceleración de la gravedad está dirigida hacia abajo y el punto desde donde la pelota cae del techo está en (x0, y0) = (0, H), (Figura 1).
Solución
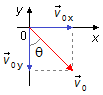
El movimiento se puede proyectar en las direcciones x e y. La velocidad inicial
v0, con la que la pelota rueda desde el techo, tiene componentes en las direcciones
x e y (Figura 2).
\[
\begin{gather}
v_{0x}=v_0\operatorname{sen}\theta\tag{I}\\[10pt]
v_{0y}=-v_0\cos\theta\tag{II}
\end{gather}
\]
donde la componente en x es proporcional al seno y en y al coseno, a diferencia de lo que
se hace comúnmente, esto se debe a que el ángulo θ fue medido con respecto al eje y.
En la dirección x no hay aceleración actuando sobre la pelota, está en Movimiento Rectilíneo Uniforme (MRU) y su movimiento está dado por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S_x=S_{0x}+v_xt}
\end{gather}
\]
dado que en el movimiento uniforme vx = v0x es constante, podemos
sustituir vx por el valor dado en (I) y S0x = 0
\[
\begin{gather}
S_x=0+v_0\operatorname{sen}\theta t\\[5pt]
S_x=v_0\operatorname{sen}\theta t\tag{III}
\end{gather}
\]
En la dirección y, la bola está bajo la acción de la aceleración de la gravedad, está en caída libre,
que se describe por las ecuaciones
\[
\begin{gather}
\bbox[#99CCFF,10px]
{S_y=S_{0y}+v_{0y}t-g\frac{t^2}{2}}
\end{gather}
\]
\[
\begin{gather}
\bbox[#99CCFF,10px]
{v_y=v_{0y}-gt}
\end{gather}
\]
sustituyendo v0y por el valor dado en (II) y S0y = H
\[
\begin{gather}
S_y=H+(-v_0\cos\theta)t-\frac{g}{2}t^2\\[5pt]
S_y=H-v_0\cos\theta t-\frac{g}{2}t^2\tag{IV}
\end{gather}
\]
\[
\begin{gather}
v_y=-v_0\cos\theta-gt\tag{V}
\end{gather}
\]
con −g constante (los signos negativos indican que la aceleración de la gravedad y la velocidad
en la dirección y están en la dirección opuesta de la orientación del sistema de referencia).
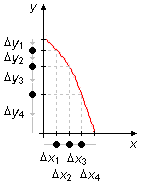
En la Figura 3 vemos que en el movimiento a lo largo de la dirección x, para intervalos de tiempo
iguales tenemos intervalos de desplazamientos iguales
(Δx1 = Δx2 = Δx3 =
Δx4). En la dirección y, en el momento en que la bola cae del borde del
techo, la velocidad vy comienza a aumentar; para intervalos de tiempo iguales, tenemos
intervalos de desplazamientos cada vez mayores
(Δy1 < Δy2 < Δy3 <
Δy4)
a) El intervalo de tiempo para que la bola alcance el suelo se obtendrá de la ecuación (IV) con la condición de que en el suelo la altura sea cero, Sy = 0
\[
\begin{gather}
0=H-v_0\cos\theta t-\frac{g}{2}t^2
\end{gather}
\]
esta es una Ecuación de Segundo Grado donde la incógnita es el valor de t.
Solución de \( -\dfrac{g}{2}t^2-v_0\cos\theta t+H=0 \)
\[
\begin{gather}
\Delta =b^2-4ac=(-v_0\cos\theta)^2-\cancelto{2}{4}\left(-{\frac{g}{\cancel 2}}\right)H=v_0^2\cos^2\theta+2gH
\end{gather}
\]
\[
\begin{split}
t=\frac{-b\pm \sqrt{\Delta \;}}{2a} &=\frac{-(-v_0\cos\theta)\pm \sqrt{v_0^2\cos^2\theta+2gH}}{\cancel{2}\left(-{\dfrac{g}{\cancel{2}}}\right)}=\\
&=\frac{-v_0\cos\theta\pm\sqrt{v_0^2\cos^2\theta+2gH}}{g}
\end{split}
\]
las raíces son
\[
\begin{gather}
t_1=\frac{-v_0\cos\theta+\sqrt{v_0^2\cos^2\theta+2gH}}{g}
\\[5pt]\text{ou}\\[5pt]
t_2=\frac{-v_0\cos\theta-\sqrt{v_0^2\cos^2\theta+2gH}}{g}
\end{gather}
\]
despreciando la segunda raíz que tiene valor negativo, t2 < 0, el tiempo para que la bola alcance el suelo será
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{t=\frac{-v_0\cos\theta+\sqrt{v_0^2\cos^2\theta+2gH}}{g}}
\end{gather}
\]
b) El intervalo de tiempo calculado anteriormente, para que la bola caiga hasta el suelo, también es el tiempo que llevará para ir desde el origen hasta el punto D a lo largo del eje x, sustituyendo la solución del ítem anterior en la expresión (III)
\[
\begin{gather}
D=v_0\operatorname{sen}\theta\left(\frac{-v_0\cos\theta+\sqrt{v_0^2\cos^2\theta+2gH}}{g}\right)\\[5pt]
D=v_0\left(\frac{-v_0\cos\theta\operatorname{sen}\theta+\operatorname{sen}\theta\sqrt{v_0^2\cos^2\theta+2gH}}{g}\right)\\[5pt]
D=v_0\left(\frac{-v_0\cos\theta\operatorname{sen}\theta+\sqrt{\operatorname{sen}^2\theta(v_0^2\cos^2\theta+2gH)}}{g}\right)\\[5pt]
D=v_0\left(\frac{-v_0\cos\theta\operatorname{sen}\theta+\sqrt{v_0^2\cos^2\theta\operatorname{sen}^2\theta+2gH\operatorname{sen}^2\theta}}{g}\right)\tag{VI}
\end{gather}
\]
De la Trigonometría
\[
\begin{gather}
\operatorname{sen}(\theta+\theta)=\operatorname{sen}\theta\cos\theta+\operatorname{sen}\theta\cos\theta\\[5pt]
\operatorname{sen}(2\theta)=2\operatorname{sen}\theta\cos\theta\\[5pt]
\cos\theta\operatorname{sen}\theta=\frac{\operatorname{sen}2\theta}{2}\tag{VII}
\end{gather}
\]
elevando al cuadrado la expresión (VII) en ambos lados de la igualdad
\[
\begin{gather}
(\cos\theta\operatorname{sen}\theta)^2=\left(\frac{\operatorname{sen}2\theta}{2}\right)^2\\[5pt]
\cos^2\theta\operatorname{sen}^2\theta=\frac{\operatorname{sen}^2\theta}{4} \tag{VIII}
\end{gather}
\]
Sustituyendo las expresiones (VII) y (VIII) en la ecuación (VI)
\[
\begin{gather}
D=v_0\left(\frac{-v_0\dfrac{\operatorname{sen}2\theta}{2}+\sqrt{v_0^2\dfrac{\operatorname{sen}^2 2\theta}{4}+2gH\operatorname{sen}^2\theta}}{g}\right)\\[5pt]
D=v_0\left(\frac{\dfrac{-v_0\operatorname{sen}2\theta}{2}+\sqrt{\dfrac{v_0^2\operatorname{sen}^2 2\theta+8gH\operatorname{sen}^2\theta}{4}}}{g}\right)\\[5pt]
D=v_0\left(\frac{\dfrac{-v_0\operatorname{sen}2\theta}{2}+\dfrac{1}{2}\sqrt{v_0^2\operatorname{sen}^2 2\theta+8gH\operatorname{sen}^2\theta}}{g}\right)
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{D=v_0\left(\frac{-v_0\operatorname{sen}2\theta+\sqrt{v_0^2\operatorname{sen}^2 2\theta+8gH\operatorname{sen}^2\theta}}{2g}\right)}
\end{gather}
\]
c) Para obtener la ecuación de la trayectoria (Figura 1), debemos tener y como función de x, es decir, y = f(x). Usando las ecuaciones (III) y (IV) para los movimientos en x e y, obtenemos el sistema
\[
\left\{
\begin{array}{l}
S_x=v_0\operatorname{sen}\theta t\\
S_y=H-v_0\cos\theta t-\dfrac{g}{2}t^2
\end{array}
\right.
\]
aislamos el tiempo en la primera ecuación
\[
\begin{gather}
t=\frac{S_x}{v_0\operatorname{sen}\theta}
\end{gather}
\]
sustituimos este valor en la segunda ecuación del sistema
\[
\begin{gather}
S_y=H-v_0\cos\theta\frac{S_x}{v_0\operatorname{sen}\theta}-\frac{g}{2}\left(\frac{S_x}{v_0\operatorname{sen}\theta}\right)^2\\[5pt]
S_y=H-\frac{\cos\theta}{\operatorname{sen}\theta}S_x-\frac{g}{2v_0^2\operatorname{sen}^2\theta}S_x^2
\end{gather}
\]
De la Trigonometria
\[
\begin{gather}
\operatorname{tg}\theta=\dfrac{\operatorname{sen}\theta}{\cos\theta}\Rightarrow \dfrac{1}{\operatorname{tg}\theta}=\dfrac{\cos\theta}{\operatorname{sen}\theta}
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{S_y=H-\frac{1}{\operatorname{tg}\theta}S_x-\frac{g}{2v_0^2\operatorname{sen}^2\theta}S_x^2}
\end{gather}
\]
Haciendo la asociación con una Función de Cuadrática del tipo
\( y=ax^2+bx+c \)
\[
\begin{array}{c}
S_y & = & -{\dfrac{g}{2v_0^2\operatorname{sen}^2\theta}} & S_x^2 & - & \dfrac{1}{\operatorname{tg}\theta} & S_x & + & H\\
\downarrow & & \downarrow & \downarrow & & \downarrow & \downarrow & & \downarrow\\
y & = & a & x^2 & + & b & x & + & c
\end{array}
\]
vemos que hemos obtenido una función del tipo Sy = f(Sx) con el
coeficiente a < 0, lo que indica que nuestra trayectoria es una parábola con la "boca" hacia abajo.
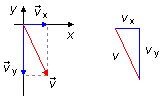
d) Cuando la bola alcanza el suelo, su velocidad tiene componentes en las direcciones x e y (Figura 4). La velocidad en la dirección x está dada por la expresión (I) y la velocidad en la dirección y se obtiene de la expresión (V), donde se sustituye el tiempo por el valor encontrado en el ítem (a)
\[
\begin{gather}
v_y=-v_0\cos\theta-\cancel{g}\left(\frac{-v_0\cos\theta+\sqrt{v_0^2\cos^2\theta+2gH}}{\cancel{g}}\right)\\[5pt]
v_y=-v_0\cos\theta+v_0\cos\theta-\sqrt{v_0^2\cos^2\theta+2gH}\\[5pt]
v_y=-\sqrt{v_0^2\cos^2\theta+2gH}
\end{gather}
\]
La velocidad de la bola será dada por la suma vectorial
\[
\begin{gather}
\vec v={\vec v}_x+{\vec v}_y
\end{gather}
\]
El módulo se obtiene aplicando el Teorema de Pitágoras
\[
\begin{gather}
v^2=v_x^2+v_y^2\\[5pt]
v^2=\left(v_0\operatorname{sen}\theta\right)^2+\left(-\sqrt{v_0^2\cos^2\theta+2gH}\right)^2\\[5pt]
v^2=v_0^2\operatorname{sen}^2\theta+v_0^2\cos^2\theta+2gH
\end{gather}
\]
factorizando
\( v_0^2 \)
del lado derecho de la igualdad
\[
\begin{gather}
v^2=v_0^2\;(\,\underbrace{{\operatorname{sen}}^2\theta+ \cos^2\theta}_1\,)+2gH
\end{gather}
\]
De la Trigonometria
\[
\begin{gather}
\operatorname{sen}^2\theta+\cos^2\theta=1
\end{gather}
\]
\[
\begin{gather}
\bbox[#FFCCCC,10px]
{v=\sqrt{v_0^2+2gH\;}}
\end{gather}
\]
publicidad

Fisicaexe - Physics Solved Problems by Elcio Brandani Mondadori is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License .