Exercício Resolvido de Dinâmica
publicidade
Em um plano áspero inclinado de 45º em relação ao horizonte AB é a reta de maior declive. Um corpo é lançado no sentido ascendente entra em repouso em B retornando ao ponto A. O coeficiente de atrito entre o móvel e o plano é \( 2-\sqrt{3\;} \). Determinar a relação entre o intervalo de tempo empregado pelo corpo para ir de A até B e no retorno de B até A.
Dados do problema:
- Coeficiente de atrito entre o móvel e o plano: \( \mu =2-\sqrt{3\;} \);
- Inclinação do plano: θ = 45°.
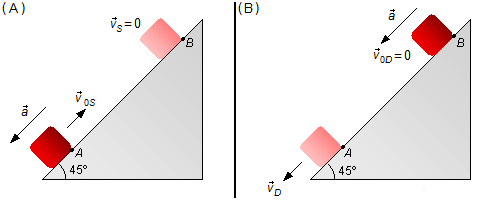
O corpo é lançado com uma velocidade inicial de subida v0S e começa a desacelerar devido a componente da força peso na direção do plano, sua velocidade diminui até ficar nula, vS = 0, no ponto B (Figura 1-A). A partir desse instante ele começa um movimento de retorno, partindo do repouso, v0D = 0, e sob a ação da aceleração, causada pela componente da força peso direção do plano, e passa pelo ponto A com uma velocidade final vD (Figura 1-B).
Solução
Isolamos o corpo e analisamos as forças que atuam nele em cada uma das situações.
- Corpo subindo:
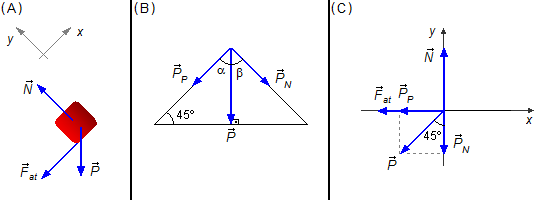
A força peso pode ser decomposta em duas componentes, uma componente paralela ao eixo-x \( {\vec P}_{P} \) e a outra componente normal ou perpendicular \( {\vec P}_{N} \) (Figura 2-B).
No triângulo à esquerda a força peso \( \vec{P} \) é perpendicular ao plano horizontal, forma um ângulo de 90°, o ângulo entre o plano inclinado e o plano horizontal é dado como 45°, como os ângulos internos de um triângulo devem somar 180°, o ângulo α entre a força peso \( \vec{P} \) e a componente paralela \( {\vec P}_{P} \) será
\[ 45°+90°+\alpha=180°\Rightarrow \alpha=180°-45°-90°\Rightarrow \alpha=45° \]
No triângulo à direita a componente normal da força peso
\( {\vec P}_{N} \)
faz com o plano inclinado um ângulo de 90°, o ângulo β entre a força peso
\( \vec{P} \)
e a componente normal
\( {\vec P}_{N} \)
será
\[ \alpha +\beta=90°\Rightarrow 45°+\beta=90°\Rightarrow \beta=90°-45°\Rightarrow \beta=45° \]
são ângulos complementares.Desenhamos as forças num sistema de eixos coordenados xy (Figura 2-C) e aplicamos a 2.ª Lei de Newton
\[
\begin{gather}
\bbox[#99CCFF,10px]
{\vec{F}=m\vec{a}} \tag{I}
\end{gather}
\]
Na direção y não há movimento, a força normal de reação
\( \vec{N} \)
e a componente normal do peso
\( {\vec P}_{N} \)
se anulam
\[
\begin{gather}
N=P_{N} \tag{II}
\end{gather}
\]
a componente normal do peso é dada por
\[
\begin{gather}
P_{N}=P\cos 45° \tag{III}
\end{gather}
\]
a força peso do corpo é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{P=mg} \tag{IV}
\end{gather}
\]
substituindo a expressão (IV) na expressão (III)
\[
\begin{gather}
P_{N}=mg\cos 45° \tag{V}
\end{gather}
\]
substituindo a expressão (V) na expressão (II)
\[
\begin{gather}
N=mg\cos 45° \tag{VI}
\end{gather}
\]
Na direção x aplicamos a expressão (I) para encontrar a aceleração do bloco
subindo aS
\[
\begin{gather}
-F_{at}-P_{P}=ma_{S} \tag{VII}
\end{gather}
\]
a força de atrito é dada por
\[
\begin{gather}
\bbox[#99CCFF,10px]
{F_{at}=\mu N} \tag{VIII}
\end{gather}
\]
substituindo a expressão (VI) na expressão (VIII)
\[
\begin{gather}
F_{at}=\mu mg\cos 45° \tag{IX}
\end{gather}
\]
a componente paralela do peso é dada por
\[
\begin{gather}
P_{P}=P\operatorname{sen}45° \tag{X}
\end{gather}
\]
substituindo a expressão (IV) na expressão (X)
\[
\begin{gather}
P_{P}=mg\operatorname{sen} 45° \tag{XI}
\end{gather}
\]
substituindo as expressões (IX) e (XI) na expressão (VII)
\[
-\mu \cancel{m}g\cos 45°-\cancel{m}g\cos 45°=\cancel{m}a_{S}
\]
Lembrando da Trigonometria
\[
\operatorname{sen}45°=\cos 45°=\dfrac{\sqrt{2\;}}{2}
\]
\[
\begin{gather}
-\mu g\frac{\sqrt{2\;}}{2}-g\frac{\sqrt{2\;}}{2}=a_{S}\\
a_{S}=-{\frac{\sqrt{2\;}}{2}}g(\mu +1) \tag{XII}
\end{gather}
\]
- Corpo descendo:
Do mesmo modo a força peso pode ser decomposta em duas componentes (Figura 2-B).
Desenhamos as forças num sistema de eixos coordenados (Figura 3-B).
Na direção y é válida a mesma expressão (VI) encontrada anteriormente.
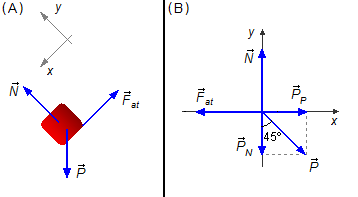
Na direção x aplicamos a 2.ª Lei de Newton
\[
\begin{gather}
-F_{at}+P_{P}=ma_{D} \tag{XIII}
\end{gather}
\]
substituindo as expressões (IX) e (XI) na expressão (XIII)
\[
\begin{gather}
-\mu \cancel{m}g\cos 45°+\cancel{m}g\cos 45°=\cancel{m}a_{D}\\
-\mu g\frac{\sqrt{2\;}}{2}+g\frac{\sqrt{2\;}}{2}=a_{D}\\
a_{D}=\frac{\sqrt{2\;}}{2}g(1-\mu) \tag{XIV}
\end{gather}
\]
Da Cinemática Escalar temos a função horária da velocidade
\[ \bbox[#99CCFF,10px]
{v=v_{0}+at}
\]
Para o bloco subindo, a velocidade final é nula, vS = 0, e
substituindo a expressão (XII)
\[
\begin{gather}
v_{S}=v_{0S}+a_{S}t_{S}\\
0=v_{0S}-{\frac{\sqrt{2\;}}{2}}g(\mu +1)t_{S}\\
v_{0S}=\frac{\sqrt{2\;}}{2}g(\mu +1)t_{S} \tag{XV}
\end{gather}
\]
Para o bloco descendo, a velocidade inicial é nula, v0D = 0,
e substituindo a expressão (XIV)
\[
\begin{gather}
v_{D}=v_{0D}+a_{D}t_{D}\\
v_{D}=0+\frac{\sqrt{2\;}}{2}g(1-\mu)t_{D}\\
v_{D}=\frac{\sqrt{2\;}}{2}g(1-\mu)t_{D} \tag{XVI}
\end{gather}
\]
Dividindo a expressão (XV) pela expressão (XVI)
\[
\begin{gather}
\frac{v_{0S}}{v_{D}}=\frac{\dfrac{\cancel{\sqrt{2\;}}}{\cancel{2}}\cancel{g}(\mu +1)t_{S}}{\dfrac{\cancel{\sqrt{2\;}}}{\cancel{2}}\cancel{g}(1-\mu)t_{D}}\\
\frac{v_{0S}}{v_{D}}=\frac{(\mu +1)t_{S}}{(1-\mu)t_{D}} \tag{XVII}
\end{gather}
\]
Para encontrarmos as velocidades usamos a Equação de Torricelli
\[ \bbox[#99CCFF,10px]
{v^{2}=v_{0}^{2}+2a\Delta S}
\]
A distância percorrida pelo bloco é a mesma na subida e descida.Durante a subida, substituindo a expressão (XII)
\[
\begin{gather}
v_{S}^{2}=v_{0S}^{2}+2a_{S}\Delta S\\
0^{2}=v_{0S}^{2}-\cancel{2}{\frac{\sqrt{2\;}}{\cancel{2}}}g(\mu +1)\Delta S\\
v_{0S}^{2}=\sqrt{2\;}g(\mu +1)\Delta S \\
v_{0S}=\sqrt{\sqrt{2\;}g(\mu +1)\Delta S\;} \tag{XVIII}
\end{gather}
\]
Durante a descida, substituindo a expressão (XIV)
\[
\begin{gather}
v_{D}^{2}=v_{0D}^{2}+2a_{D}\Delta S\\
v_{D}^{2}=0^{2}+\cancel{2}\frac{\sqrt{2\;}}{\cancel{2}}g(1-\mu)\Delta S\\
v_{D}^{2}=\sqrt{2\;}g(1-\mu)\Delta S\\
v_{D}=\sqrt{\sqrt{2\;}g(1-\mu)\Delta S\;} \tag{XIX}
\end{gather}
\]
Substituindo as expressões (XVIII) e (XIX) na expressão (XVII)
\[
\begin{gather}
\frac{\sqrt{\sqrt{2\;}g(\mu +1)\Delta S\;}}{\sqrt{\sqrt{2\;}g(1-\mu)\Delta S\;}}=\frac{(\mu +1)t_{S}}{(1-\mu)t_{D}}
\end{gather}
\]
elevando ao quadrado ambos os lados da equação
\[
\begin{gather}
\left(\frac{\sqrt{\sqrt{2\;}g(\mu +1)\Delta S\;}}{\sqrt{\sqrt{2\;}g(1-\mu)\Delta S\;}}\right)^{2}=\left(\frac{(\mu +1)t_{S}}{(1-\mu)t_{D}}\right)^{2}\\
\frac{\cancel{\sqrt{2\;}}\cancel{g}\cancel{(\mu +1)}\cancel{\Delta S}}{\cancel{\sqrt{2\;}}\cancel{g}\cancel{(1-\mu)}\cancel{\Delta S}}=\frac{(\mu +1)^{\cancel{2}}t_{S}^{2}}{(1-\mu)^{\cancel{2}}t_{D}^{2}}\\
1=\frac{(\mu +1)t_{S}^{2}}{(1-\mu)t_{D}^{2}}
\end{gather}
\]
\[
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{1-\mu}{(\mu +1)}
\]
substituindo o valor de μ dado no problema
\[
\begin{gather}
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{1-(2-\sqrt{3\;})}{2-\sqrt{3}+1}\\[5pt]
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{1-2+\sqrt{3\;}}{3-\sqrt{3\;}}\\[5pt]
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{-1+\sqrt{3\;}}{3-\sqrt{3\;}}
\end{gather}
\]
para racionalizar essa expressão multiplicamos o numerador e o denominador por
\( 3+\sqrt{3\;} \)
\[
\begin{gather}
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{-1+\sqrt{3\;}}{3-\sqrt{3\;}}.\frac{3+\sqrt{3\;}}{3+\sqrt{3\;}}\\[5pt]
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{-3-\sqrt{3\;}+3\sqrt{3\;}+3}{9+3\sqrt{3\;}-3\sqrt{3\;}-3}\\[5pt]
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{2\sqrt{3\;}}{6}\\[5pt]
\left(\frac{t_{S}}{t_{D}}\right)^{2}=\frac{\sqrt{3\;}}{3}
\end{gather}
\]
\[ \bbox[#FFCCCC,10px]
{\frac{t_{S}}{t_{D}}=\sqrt{\frac{\sqrt{3\;}}{3}}}
\]
publicidade

Fisicaexe - Exercícios Resolvidos de Física de Elcio Brandani Mondadori está licenciado com uma Licença Creative Commons - Atribuição-NãoComercial-Compartilha Igual 4.0 Internacional .